Marburg virus disease poses a significant risk to global health, impacting both humans and non-human primates. This study has yielded an optimal control model for potentially mitigating the transmission of the Marburg infection. The proposed mathematical model includes fractional-order derivatives in the Caputo sense. Initially, we analyzed the model without control measures, examining its key characteristics regarding local and global stabilities. Subsequently, we extended the model by incorporating suitable time-dependent optimal control variables. We have also introduced two time-dependent control measures: $ \Psi_1 $ for the prevention of human-to-human Marburg transmission, and $ \Psi_2 $ to enhance the rate of quarantine of exposed individuals. We performed simulation analysis for both cases i.e., with and without optimal controls using the two-step Newton polynomial approximation method, considering both fractional and classical orders. The numerical findings of the comparative study between classical and fractional cases validate the biological significance of the fractional operator and effectiveness of the proposed optimal control strategies.
Citation: Meroua Medjoudja, Mohammed El hadi Mezabia, Muhammad Bilal Riaz, Ahmed Boudaoui, Saif Ullah, Fuad A. Awwad. A novel computational fractional modeling approach for the global dynamics and optimal control strategies in mitigating Marburg infection[J]. AIMS Mathematics, 2024, 9(5): 13159-13194. doi: 10.3934/math.2024642
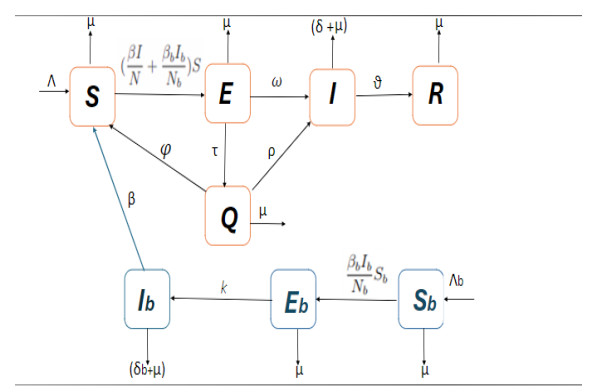
Marburg virus disease poses a significant risk to global health, impacting both humans and non-human primates. This study has yielded an optimal control model for potentially mitigating the transmission of the Marburg infection. The proposed mathematical model includes fractional-order derivatives in the Caputo sense. Initially, we analyzed the model without control measures, examining its key characteristics regarding local and global stabilities. Subsequently, we extended the model by incorporating suitable time-dependent optimal control variables. We have also introduced two time-dependent control measures: $ \Psi_1 $ for the prevention of human-to-human Marburg transmission, and $ \Psi_2 $ to enhance the rate of quarantine of exposed individuals. We performed simulation analysis for both cases i.e., with and without optimal controls using the two-step Newton polynomial approximation method, considering both fractional and classical orders. The numerical findings of the comparative study between classical and fractional cases validate the biological significance of the fractional operator and effectiveness of the proposed optimal control strategies.

| [1] | Virus de Marburg: premier cas en Afrique de l'Ouest détecté en Guinée. Available from: https://information.tv5monde.com/afrique/virus-de-marburg-premier-cas-en-afrique-de-louest-detecte-en-guinee-35480 |
| [2] |
M. A. Almuqrin, P. Goswami, S. Sharma, I. Khan, R. S. Dubey, A. Khan, Fractional model of Ebola virus in population of bats in frame of Atangana-Baleanu fractional derivative, Results Phys., 26 (2021), 104295. https://doi.org/10.1016/j.rinp.2021.104295 doi: 10.1016/j.rinp.2021.104295

|
| [3] |
S. Ahmad, A. Ullah, Q. M. Al-Mdallal, H. Khan, K. Shah, A. Khan, Fractional order mathematical modeling of COVID-19 transmission, Chaos Solitons Fractals, 139 (2020), 110256. https://doi.org/10.1016/j.chaos.2020.110256 doi: 10.1016/j.chaos.2020.110256
|
| [4] |
V. S. Panwar, P. S. S. Udumana, J. F. Gómez-Aguilar, Mathematical modeling of coronavirus disease COVID-19 dynamics using CF and ABC non-singular fractional derivatives, Chaos Solitons Fractals, 145 (2021), 110757. https://doi.org/10.1016/j.chaos.2021.110757 doi: 10.1016/j.chaos.2021.110757
|
| [5] |
M. Vellappandi, P. Kumar, V. Govindaraj, Role of fractional derivatives in the mathematical modeling of the transmission of Chlamydia in the United States from 1989 to 2019, Nonlinear Dyn., 111 (2023), 4915–4929. https://doi.org/10.1007/s11071-022-08073-3 doi: 10.1007/s11071-022-08073-3
|
| [6] |
P. Kumar, V. S. Erturk, A. Yusuf, S. Kumar, Fractional time-delay mathematical modeling of Oncolytic Virotherapy, Chaos Solitons Fractals, 150 (2021), 111123. https://doi.org/10.1016/j.chaos.2021.111123 doi: 10.1016/j.chaos.2021.111123
|
| [7] |
P. Kumar, V. S. Erturk, R. Banerjee, M. Yavuz, V. Govindaraj, Fractional modeling of plankton-oxygen dynamics under climate change by the application of a recent numerical algorithm, Phys. Scr., 96 (2021), 124044. https://doi.org/10.1088/1402-4896/ac2da7 doi: 10.1088/1402-4896/ac2da7
|
| [8] |
V. S. Erturk, A. Ahmadkhanlu, P. Kumar, V. Govindaraj, Some novel mathematical analysis on a corneal shape model by using Caputo fractional derivative, Optik, 261, (2022), 169086. https://doi.org/10.1016/j.ijleo.2022.169086 doi: 10.1016/j.ijleo.2022.169086
|
| [9] |
V. S. Erturk, E. Godwe, D. Baleanu, P. Kumar, J. Asad, A. Jajarmi, Novel fractional-order Lagrangian to describe motion of beam on nanowire, Acta Phys. Polon. A, 140 (2021), 265–272. https://doi.org/10.12693/APhysPolA.140.265 doi: 10.12693/APhysPolA.140.265
|
| [10] |
V. S. Erturk, A. K. Alomari, P. Kumar, M. Murillo-Arcila, Analytic solution for the strongly nonlinear multi-order fractional version of a BVP occurring in chemical reactor theory, Discrete Dyn. Nat. Soc., 2022 (2022), 8655340. https://doi.org/10.1155/2022/8655340 doi: 10.1155/2022/8655340
|
| [11] |
P. Kumar, V. Govindaraj, V. S. Erturk, M. H. Abdellattif, A study on the dynamics of alkali-silica chemical reaction by using Caputo fractional derivative, Pramana-J. Phys., 96 (2022), 128. https://doi.org/10.1007/s12043-022-02359-2 doi: 10.1007/s12043-022-02359-2
|
| [12] |
H. Sun, Y. Zhang, D. Baleanu, W. Chen, Y. Chen, A new collection of real world applications of fractional calculus in science and engineering, Commun. Nonlinear Sci. Numer. Simul., 64 (2018), 213–231. https://doi.org/10.1016/j.cnsns.2018.04.019 doi: 10.1016/j.cnsns.2018.04.019
|
| [13] |
Y. A. Rossikhin, M. V. Shitikova, Application of fractional calculus for dynamic problems of solid mechanics: Novel trends and recent results, Appl. Mech. Rev., 63 (2010), 010801. https://doi.org/10.1115/1.4000563 doi: 10.1115/1.4000563
|
| [14] |
P. Kumar, V. S. Erturk, M. Murillo-Arcila, A complex fractional mathematical modeling for the love story of Layla and Majnun, Chaos Solitons Fractals, 150 (2021), 111091. https://doi.org/10.1016/j.chaos.2021.111091 doi: 10.1016/j.chaos.2021.111091
|
| [15] | E. Okyere, F. T. Oduro, S. K. Amponsah, I. K. Dontwi, Fractional order optimal control model for malaria infection, arXiv: 1607.01612, 2016. https://doi.org/10.48550/arXiv.1607.01612 |
| [16] |
H. M. Ali, F. L. Pereira, S. M. Gama, A new approach to the Pontryagin maximum principle for nonlinear fractional optimal control problems, Math. Methods Appl. Sci., 39 (2016), 3640–3649. https://doi.org/10.1002/mma.3811 doi: 10.1002/mma.3811
|
| [17] |
T. K. Ayele, E. F. D. Goufo, S. Mugisha, Mathematical modeling of HIV/AIDS with optimal control: A case study in Ethiopia, Results Phys., 26 (2021), 104263. https://doi.org/10.1016/j.rinp.2021.104263 doi: 10.1016/j.rinp.2021.104263
|
| [18] |
H. Alrabaiah, M. A. Safi, M. H. DarAssi, B. Al-Hdaibat, S. Ullah, M. A.Khan, et al., Optimal control analysis of hepatitis B virus with treatment and vaccination, Results Phys., 19 (2020), 103599. https://doi.org/10.1016/j.rinp.2020.103599 doi: 10.1016/j.rinp.2020.103599
|
| [19] |
Y. E. Moussa, A. Boudaoui, S. Ullah, K. Muzammil, M. B. Riaz, Application of fractional optimal control theory for the mitigating of novel coronavirus in Algeria, Results Phys., 39 (2022), 105651. https://doi.org/10.1016/j.rinp.2022.105651 doi: 10.1016/j.rinp.2022.105651
|
| [20] | J. Amoah-Mensah, N. K. D. O. Opoku, R. N. Borkor, F. O. Boateng, K. Bonsu, V. Afosa, et al., Mathematical modelling of the transmission dynamics of Marburg virus disease with optimal control and cost-effectiveness analysis based on lessons from Ebola virus disease, 2023. https://dx.doi.org/10.2139/ssrn.4639641 |
| [21] |
E. Addai, A. Adeniji, M. Ngungu, G. K. Tawiah, E. Marinda, J. K. K. Asamoah, et al., A nonlinear fractional epidemic model for the Marburg virus transmission with public health education, Sci. Rep., 13 (2023), 192923. https://doi.org/10.1038/s41598-023-46127-7 doi: 10.1038/s41598-023-46127-7
|
| [22] | C. Milici, G. Drăgănescu, J. T. Machado, Introduction to fractional differential equations, Springer Cham, 2019. https://doi.org/10.1007/978-3-030-00895-6 |
| [23] | D. J. Washachi, H. O. Orapine, A. A. Baidu, J. A. Amoka, Mathematical model for the transmission dunamics of Marburg virus diseases with contact tracing and effectiv quarantine, FUW Trends Sci. Technol. J., 7 (2022), 35–43. |
| [24] | J. F. Gómez-Aguilar, J. J. Rosales-García, J. J. Bernal-Alvarado, T. Córdova-Fraga, R. Guzmán-Cabrera, Fractional mechanical oscillators, Rev. Mex. Fis., 58 (2012), 348–352. |
| [25] |
V. Driessche, J. Watmough, Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission, Math. Biosci., 180 (2002), 29–48. https://doi.org/10.1016/S0025-5564(02)00108-6 doi: 10.1016/S0025-5564(02)00108-6
|
| [26] |
Y. E. Moussa, A. Boudaoui, S. Ullah, F. Bozkurt, T. Abdeljawad, M. A. Alqudah, Stability analysis and simulation of the novel Corornavirus mathematical model via the Caputo fractional-order derivative: A case study of Algeria, Results Phys., 26 (2021), 104324. https://doi.org/10.1016/j.rinp.2021.104324 doi: 10.1016/j.rinp.2021.104324
|
| [27] |
C. Vargas-De-Léon, Volterra-type Lyapunov functions for fractionalorder epidemic systems, Commun. Nonlinear Sci. Numer. Simul., 24 (2015), 75–85. https://doi.org/10.1016/j.cnsns.2014.12.013 doi: 10.1016/j.cnsns.2014.12.013
|
| [28] |
N. Aguila-Camacho, M. A. Duarte-Mermoud, J. A.Gallegos, Lyapunov functions for fractional order systems, Commun. Nonlinear Sci. Numer. Simul., 19 (2014), 2951–2957. https://doi.org/10.1016/j.cnsns.2014.01.022 doi: 10.1016/j.cnsns.2014.01.022
|
| [29] | F. M. Tiraga, L. C. Kavi, N. A. Neudauer, Comparing small world network and traditional models of Marburg virus disease, J. Math. Comput. Sci., 11 (2021), 7773–7792. |
| [30] |
G. Y. Qian, W. J. Edmunds, D. G. Bausch, T. Jombart, A mathematical model of Marburg virus disease outbreaks and the potential role of vaccination in control, BMC Med., 21 (2023), 439. https://doi.org/10.1186/s12916-023-03108-x doi: 10.1186/s12916-023-03108-x
|
| [31] |
J. S. Towner, B. R. Amman, T. K. Sealy, S. A. R. Carroll, J. A. Comer, A. Kemp, et al., Isolation of genetically diverse Marburg viruses from Egyptian fruit bats, PLoS Pathog., 5 (2009), e1000536. https://doi.org/10.1371/journal.ppat.1000536 doi: 10.1371/journal.ppat.1000536
|
| [32] | G. Cuomo-Dannenburg, K. McCain, R. McCabe, H. J. T. Unwin, P. Doohan, R. K. Nash, et al., Marburg virus disease outbreaks, mathematical models, and disease parameters: A systematic review, The Lancet Infectious Diseases, 2023. https://doi.org/10.1101/2023.07.10.23292424 |
| [33] |
O. Sharomi, T. Malik, Optimal control in epidemiology, Ann. Oper. Res., 251 (2017), 55–71. https://doi.org/10.1007/s10479-015-1834-4 doi: 10.1007/s10479-015-1834-4
|





Figures(6) / Tables(2)

Meroua Medjoudja, Mohammed El hadi Mezabia, Muhammad Bilal Riaz, Ahmed Boudaoui, Saif Ullah, Fuad A. Awwad. A novel computational fractional modeling approach for the global dynamics and optimal control strategies in mitigating Marburg infection[J]. AIMS Mathematics, 2024, 9(5): 13159-13194. doi: 10.3934/math.2024642







 DownLoad:
DownLoad: