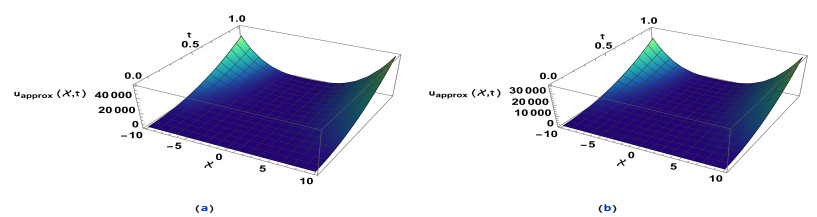
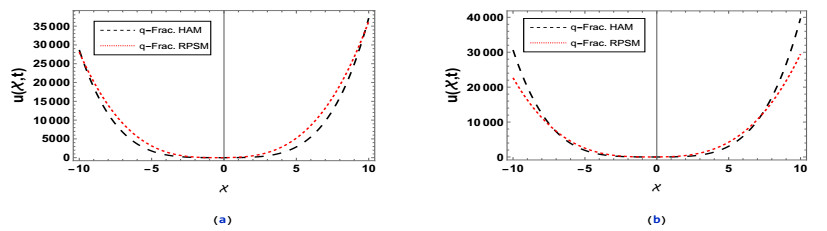
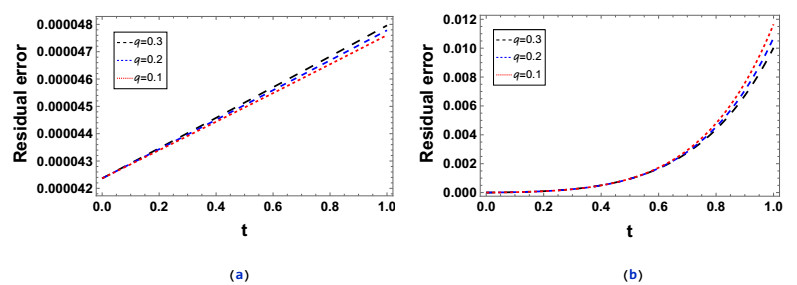
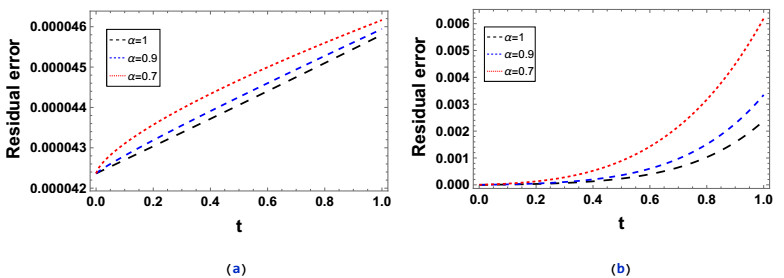
This paper presents an innovative approach to solve $ \mathit{q} $-fractional partial differential equations through a combination of two semi-analytical techniques: The Residual Power Series Method (RPSM) and the Homotopy Analysis Method (HAM). Both methods are extended to obtain approximations for $ \mathit{q} $-fractional partial differential equations ($ \mathit{q} $-FPDEs). These equations are significant in $ \mathit{q} $-calculus, which has gained attention due to its relevance in engineering applications, particularly in quantum mechanics. In this study, we solve linear and nonlinear $ \mathit{q} $-FPDEs and obtain the closed-form solutions, which confirm the validity of the utilized methods. The results are further illustrated through two-dimensional and three-dimensional graphs, thus highlighting the interaction between parameters, particularly the fractional parameter, the $ \mathit{q} $-calculus parameter, and time.
Citation: Khalid K. Ali, Mohamed S. Mohamed, M. Maneea. A novel approach to $ \mathit{q} $-fractional partial differential equations: Unraveling solutions through semi-analytical methods[J]. AIMS Mathematics, 2024, 9(12): 33442-33466. doi: 10.3934/math.20241596
This paper presents an innovative approach to solve $ \mathit{q} $-fractional partial differential equations through a combination of two semi-analytical techniques: The Residual Power Series Method (RPSM) and the Homotopy Analysis Method (HAM). Both methods are extended to obtain approximations for $ \mathit{q} $-fractional partial differential equations ($ \mathit{q} $-FPDEs). These equations are significant in $ \mathit{q} $-calculus, which has gained attention due to its relevance in engineering applications, particularly in quantum mechanics. In this study, we solve linear and nonlinear $ \mathit{q} $-FPDEs and obtain the closed-form solutions, which confirm the validity of the utilized methods. The results are further illustrated through two-dimensional and three-dimensional graphs, thus highlighting the interaction between parameters, particularly the fractional parameter, the $ \mathit{q} $-calculus parameter, and time.

| [1] | M. Lazarevic, Advanced topics on applications of fractional calculus on control problems, WSEAS Press, 2014. |
| [2] |
A. Elsaid, M. S. Abdel Latif, M. Maneea, Similarity solutions of fractional order heat equations with variable coefficients, Miskolc Math. Notes, 17 (2016), 245–254. https://doi.org/10.18514/MMN.2016.1610 doi: 10.18514/MMN.2016.1610

|
| [3] |
K. K. Ali, M. Maneea, M. S. Mohamed, Solving nonlinear fractional models in superconductivity using the q-homotopy analysis transform method, J. Math., 2023 (2023), 6647375. https://doi.org/10.1155/2023/6647375. doi: 10.1155/2023/6647375
|
| [4] |
K. K. Ali, M. A. Maaty, M. Maneea, Optimizing option pricing: Exact and approximate solutions for the time-fractional Ivancevic model, Alex. Eng. J., 84 (2023), 59–70. https://doi.org/10.1016/j.aej.2023.10.066 doi: 10.1016/j.aej.2023.10.066
|
| [5] |
K. K. Ali, A. M. Wazwaz, M. Maneea, Efficient solutions for fractional Tsunami shallow-water mathematical model: A comparative study via semi analytical techniques, Chaos Soliton. Fract., 178 (2024), 114347. https://doi.org/10.1016/j.chaos.2023.114347 doi: 10.1016/j.chaos.2023.114347
|
| [6] |
F. Mirzaee, K. Sayevand, S. Rezaei, N. Samadyar, Finite difference and spline approximation for solving fractional stochastic advection-diffusion equation, Iran. J. Sci. Technol. Trans. Sci., 45 (2021), 607–617. https://doi.org/10.1007/s40995-020-01036-6 doi: 10.1007/s40995-020-01036-6
|
| [7] |
F. Mirzaee, N. Samadyar, Implicit meshless method to solve 2D fractional stochastic Tricomi-type equation defined on irregular domain occurring in fractal transonic flow, Numer. Meth. Part. Differ. Equ., 37 (2021), 1781–1799. https://doi.org/10.1002/num.22608 doi: 10.1002/num.22608
|
| [8] |
F. Mirzaee, S. Rezaei, N. Samadyar, Solving one-dimensional nonlinear stochastic Sine-Gordon equation with a new meshfree technique, Int. J. Numer. Model., 34 (2021), e2856. https://doi.org/10.1002/jnm.2856 doi: 10.1002/jnm.2856
|
| [9] | F. Mirzaee, S. Rezaei, N. Samadyar, Application of combination schemes based on radial basis functions and finite difference to solve stochastic coupled nonlinear time fractional sine-Gordon equations, Comp. Appl. Math., 41 (2022). https://doi.org/10.1007/s40314-021-01725-x |
| [10] |
F. H. Jackson, On q-functions and a certain difference operator, Earth Env. Sci. Trans. R. Soc. Edinb., 46 (1909), 253–281. http://dx.doi.org/10.1017/S0080456800002751 doi: 10.1017/S0080456800002751
|
| [11] |
R. Askey, The q-Gamma and q-Beta functions, Appl. Anal., 8 (1978), 125–141. https://doi.org/10.1080/00036817808839221 doi: 10.1080/00036817808839221
|
| [12] |
M. H. Annaby, Z. S. Mansour, q-Taylor and interpolation series for Jackson q-difference operators, J. Math. Anal. Appl., 334 (2008), 472–483. https://doi.org/10.1016/j.jmaa.2008.02.033 doi: 10.1016/j.jmaa.2008.02.033
|
| [13] | M. H. Annaby, Z. S. Mansour, q-fractional calculus and equations, Springer-Verlag Berlin Heidelberg, 2012. https://doi.org/10.1007/978-3-642-30898-7 |
| [14] |
Y. Sheng, T. Zhang, Some results on the q-calculus and fractional q-differential equations, Mathematics, 10 (2022), 64. https://doi.org/10.3390/math10010064 doi: 10.3390/math10010064
|
| [15] | S. Abbas, B. Ahmad, M. Benchohra, A. Salim, Fractional difference, differential equations, and inclusions, Elsevier, 2024. http://dx.doi.org/10.1016/C2023-0-00030-9 |
| [16] |
T. Zhang, Q. X. Guo, The solution theory of the nonlinear q-fractional differential equations, Appl. Math. Lett., 104 (2020), 106282. https://doi.org/10.1016/j.aml.2020.106282 doi: 10.1016/j.aml.2020.106282
|
| [17] |
T. Zhang, Y. Z. Wang, The unique existence of solution in the q-integrable space for the nonlinear q-fractional differential equations, Fractals, 29 (2021), 2150050. https://doi.org/10.1142/S0218348X2150050X doi: 10.1142/S0218348X2150050X
|
| [18] |
M. El-Shahed, M. Gaber, Two-dimensional q-differential transformation and its application, Appl. Math. Comput., 217 (2011), 9165–9172. https://doi.org/10.1016/j.amc.2011.03.152 doi: 10.1016/j.amc.2011.03.152
|
| [19] | H. Jafari, A. Haghbtn, S. Hesam, D. Baleanu, Solving partial q-differential equations within reduced q-differential transformation method, Rom. Journ. Phys., 59 (2014), 399–407. https://shorturl.at/Y0kkT |
| [20] |
M. O. Sadik, B. O. Orie, Application of q-calculus to the solution of partial q-differential equations, Appl. Math., 12 (2021), 669–678. https://doi.org/10.4236/am.2021.128047 doi: 10.4236/am.2021.128047
|
| [21] |
M. S. Semary, H. N. Hassan, The homotopy analysis method for q-difference equations, Ain Shams Eng. J., 9 (2018), 415–421. https://doi.org/10.1016/j.asej.2016.02.005 doi: 10.1016/j.asej.2016.02.005
|
| [22] |
G. C. Wu, Variational iteration method for q-difference equations of second order, J. Appl. Math., 2012 (2012), 102850. https://doi.org/10.1155/2012/102850 doi: 10.1155/2012/102850
|
| [23] | Y. X. Zeng, Y. Zeng, G. C. Wu, Application of the variational iteration method to the initial value problems of q-difference equations-some examples, Commun. Numer. Anal., 2013. http://dx.doi.org/10.5899/2013/cna-00180 |
| [24] | P. Bhattacharya, R. Ranjan, Solution to Laplace's equation using quantum calculus, Int. J. Eng. Technol. Manag. Sci., 5 (2023). https://doi.org/10.46647/ijetms.2023.v07i05.066 |
| [25] |
F. M. Atici, P. W. Eloe, Fractional q-calculus on a time scale, J. Nonlinear Math. Phy., 14(2007), 341–352. https://doi.org/10.2991/jnmp.2007.14.3.4 doi: 10.2991/jnmp.2007.14.3.4
|
| [26] |
M. El-Shahed, M. Gaber, M. Al-Yami, The fractional q-differential transformation and its application, Commun. Nonlinear Sci. Numer. Simul., 18 (2013), 42–55. https://doi.org/10.1016/j.cnsns.2012.06.016 doi: 10.1016/j.cnsns.2012.06.016
|
| [27] |
L. Chanchlani, S. Alha, J. Gupta, Generalization of Taylor's formula and differential transform method for composite fractional q-derivative, Ramanujan J., 48 (2019), 21–32. https://doi.org/10.1007/s11139-018-9997-7 doi: 10.1007/s11139-018-9997-7
|
| [28] |
B. Madhavi, G. Suresh Kumar, S. Nagalakshmi, T. S. Rao, Generalization of homotopy analysis method for q-fractional non-linear differential equations, Int. J. Anal. Appl., 22 (2024), 22. https://doi.org/10.28924/2291-8639-22-2024-22 doi: 10.28924/2291-8639-22-2024-22
|
| [29] |
J. X. Li, Y. Yan, W. Q. Wang, Secondary resonance of a cantilever beam with concentrated mass under time delay feedback control, Appl. Math. Model., 135 (2024), 131–148. https://doi.org/10.1016/j.apm.2024.06.039 doi: 10.1016/j.apm.2024.06.039
|
| [30] | M. S. Stankovic, P. M. Rajkovic, S. D. Marinkovic, Fractional integrals and derivatives in q-calculus, Appl. Anal. Discret. Math., 1 (2007), 311–323. |
| [31] | M. S. Stankovic, P. M. Rajkovic, S. D. Marinkovic, On q-fractional deravtives of Riemann-Liouville and Caputo type, arXiv, 2009. https://doi.org/10.48550/arXiv.0909.0387 |
| [32] |
T. Abdeljawad, D. Baleanu, Caputo q-fractional initial value problems and a q-analogue Mittag-Leffler function, Commun. Nonlinear Sci. Numer. Simul., 16 (2011), 4682–4688. https://doi.org/10.1016/j.cnsns.2011.01.026 doi: 10.1016/j.cnsns.2011.01.026
|
| [33] |
T. Ernst, On various formulas with q-integralsand their applications to q-hypergeometric functions, Eur. J. Pure Appl. Math., 13 (2020), 1241–1259. https://doi.org/10.29020/nybg.ejpam.v13i5.3755 doi: 10.29020/nybg.ejpam.v13i5.3755
|
| [34] | S. Liao, Beyond perturbation: Introduction to the homotopy analysis method, CRC Press, 2003. https://doi.org/10.1201/9780203491164 |
| [35] |
S. J. Liao, An optimal homotopy-analysis approach for strongly nonlinear differential equations, Commun. Nonlinear Sci. Numer. Simul., 15 (2010), 2003–2016. https://doi.org/10.1016/j.cnsns.2009.09.002 doi: 10.1016/j.cnsns.2009.09.002
|
| [36] |
M. G. Sakar, F. Erdogan, The homotopy analysis method for solving the time-fractional Fornberg-Whitham equation and comparison with Adomians decomposition method, Appl. Math. Model., 37 (2013), 8876–8885. https://doi.org/10.1016/j.apm.2013.03.074 doi: 10.1016/j.apm.2013.03.074
|
| [37] |
K. K. Ali, M. Maneea, Optical solitons using optimal homotopy analysis method for time-fractional (1+1)-dimensional coupled nonlinear Schrodinger equations, Optik, 283 (2023), 170907. https://doi.org/10.1016/j.ijleo.2023.170907 doi: 10.1016/j.ijleo.2023.170907
|
| [38] |
M. Shqair, A. El-Ajou, M. Nairat, Analytical solution for multi-energy groups of neutron diffusion equations by a residual power series method, Mathematics, 7 (2019), 633. https://doi.org/10.3390/math7070633 doi: 10.3390/math7070633
|
| [39] |
Z. Y. Fan, K. K. Ali, M. Maneea, M. Inc, S. W. Yao, Solution of time fractional Fitzhugh-Nagumo equation using semi analytical techniques, Results Phys., 51 (2023), 106679. https://doi.org/10.1016/j.rinp.2023.106679 doi: 10.1016/j.rinp.2023.106679
|

Figures(14) / Tables(4)

Khalid K. Ali, Mohamed S. Mohamed, M. Maneea. A novel approach to $ \mathit{q} $-fractional partial differential equations: Unraveling solutions through semi-analytical methods[J]. AIMS Mathematics, 2024, 9(12): 33442-33466. doi: 10.3934/math.20241596







 DownLoad:
DownLoad: