This paper investigates the event-triggered state estimation problem for a class of complex networks (CNs) suffered by hybrid cyber-attacks. It is assumed that a wireless network exists between sensors and remote estimators, and that data packets may be modified or blocked by malicious attackers. Adaptive event-triggered scheme (AETS) is introduced to alleviate the network congestion problem. With the help of two sets of Bernoulli distribution variables (BDVs) and an arbitrary function related to the system state, a mathematical model of the hybrid cyber-attacks is developed to portray randomly occurring denial-of-service (DoS) attacks and deception attacks. CNs, AETS, hybrid cyber-attacks, and state estimators are then incorporated into a unified architecture. The system state is cascaded with state errors as an augmented system. Furthermore, based on Lyapunov stability theory and linear matrix inequalities (LMIs), sufficient conditions to ensure the asymptotic stability of the augmented system are derived, and the corresponding state estimator is designed. Finally, the effectiveness of the theoretical method is demonstrated by numerical examples and simulations.
Citation: Yahan Deng, Zhenhai Meng, Hongqian Lu. Adaptive event-triggered state estimation for complex networks with nonlinearities against hybrid attacks[J]. AIMS Mathematics, 2022, 7(2): 2858-2877. doi: 10.3934/math.2022158
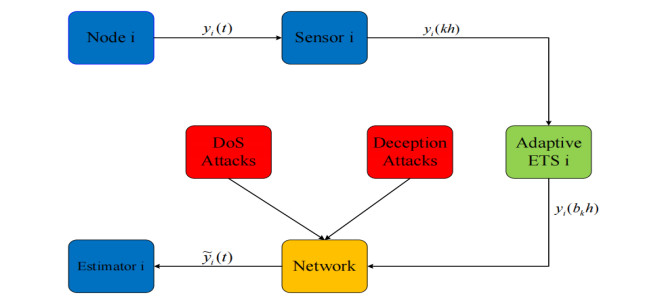
This paper investigates the event-triggered state estimation problem for a class of complex networks (CNs) suffered by hybrid cyber-attacks. It is assumed that a wireless network exists between sensors and remote estimators, and that data packets may be modified or blocked by malicious attackers. Adaptive event-triggered scheme (AETS) is introduced to alleviate the network congestion problem. With the help of two sets of Bernoulli distribution variables (BDVs) and an arbitrary function related to the system state, a mathematical model of the hybrid cyber-attacks is developed to portray randomly occurring denial-of-service (DoS) attacks and deception attacks. CNs, AETS, hybrid cyber-attacks, and state estimators are then incorporated into a unified architecture. The system state is cascaded with state errors as an augmented system. Furthermore, based on Lyapunov stability theory and linear matrix inequalities (LMIs), sufficient conditions to ensure the asymptotic stability of the augmented system are derived, and the corresponding state estimator is designed. Finally, the effectiveness of the theoretical method is demonstrated by numerical examples and simulations.

| [1] |
H. Shen, M. P. Xing, Z. G. Wu, J. D. Cao, T. W. Huang, $l_2-l_\infty$ state estimation for persistent Dwell-time switched coupled networks subject to round-robin protocol, IEEE T. Neur. Net. Lear., 32 (2020), 2002–2014. doi: 10.1109/TNNLS.2020.2995708. doi: 10.1109/TNNLS.2020.2995708

|
| [2] |
T. D. Wei, X. Xie, X. D. Li, Input-to-state stability of delayed reaction-diffusion neural networks with multiple impulses, AIMS Mathematics, 6 (2021), 5786–5800. doi: 10.3934/math.2021342. doi: 10.3934/math.2021342
|
| [3] | H. L. Dong, N. Hou, Z. D. Wang, Fault estimation for complex networks with randomly varying topologies and stochastic inner couplings, Automatica, 112 (2020), 108734. doi: 10.1016/j.automatica.2019.108734. |
| [4] |
J. Hu, Z. D. Wang, G. P. Liu, H. X. Zhang, Variance-constrained recursive state estimation for time-varying complex networks with quantized measurements and uncertain inner coupling, IEEE T. Neur. Net. Lear., 31 (2020), 1955–1967. doi: 10.1109/TNNLS.2019.2927554. doi: 10.1109/TNNLS.2019.2927554
|
| [5] |
R. Sakthivel, M. Sathishkumar, B. Kaviarasan, S. M. Anthoni, Synchronization and state estimation for stochastic complex networks with uncertain inner coupling, Neurocomputing, 328 (2017), 44–55. doi: 10.1016/j.neucom.2017.01.035. doi: 10.1016/j.neucom.2017.01.035
|
| [6] |
L. Liu, X. W. Ding, W. N. Zhou, Prescribed-time cluster synchronization of uncertain complex dynamical networks with switching via pinning control, Neurocomputing, 419 (2021), 136–147. doi: 10.1016/j.neucom.2020.08.043. doi: 10.1016/j.neucom.2020.08.043
|
| [7] |
Y. R. Liu, Z. D. Wang, Y. Yuan, F. E. Alsaadi, Partial-nodes-based state estimation for complex networks with unbounded distributed delays, IEEE T. Neur. Net. Lear., 29 (2018), 3906–3912. doi: 10.1109/TNNLS.2017.2740400. doi: 10.1109/TNNLS.2017.2740400
|
| [8] |
W. L. Li, Y. M. Jia, J. P. Du, State estimation for stochastic complex networks with switching topology, IEEE T. Automat. Contr, 62 (2017), 6377–6384. doi: 10.1109/TAC.2017.2649878. doi: 10.1109/TAC.2017.2649878
|
| [9] |
F. E. Alsaadi, Z. D. Wang, D. Wang, F. E. Alsaadi, F. W. Alsaade, Recursive fusion estimation for stochastic discrete time-varying complex networks under stochastic communication protocol: The state-saturated case, Inform. Fusion, 60 (2020), 11–19. doi: 10.1016/j.inffus.2020.01.012. doi: 10.1016/j.inffus.2020.01.012
|
| [10] |
N. Hou, Z. D. Wang, D. W. C. Ho, H. L. Dong, Robust partial-nodes-based state estimation for complex networks under deception attacks, IEEE T. Cybernetics., 50 (2020), 2793–2802. doi: 10.1109/TCYB.2019.2918760. doi: 10.1109/TCYB.2019.2918760
|
| [11] |
H. Q. Lu, Y. H. Deng, W. N. Zhou, Hierarchical type stability and stabilization of networked control systems with event-triggered mechanism via canonical Bessel–Legendre inequalities, J. Franklin I., 358 (2021), 6592–6611. doi: 10.1016/j.jfranklin.2021.06.024. doi: 10.1016/j.jfranklin.2021.06.024
|
| [12] |
Y. S. Tan, S. M. Fei, J. L. Liu, Distributed hybrid-triggered state estimation for complex networked system with network attacks, China Sci. Inf. Ser., 48 (2018), 1198–1213. doi: 10.1360/N112017-00279. doi: 10.1360/N112017-00279
|
| [13] |
Y. S. Tan, Y. Liu, B. Niu, S. M. Fei, Event-triggered synchronization control for T–S fuzzy neural networked systems with time delay, J. Franklin I., 357 (2020), 5934–5953. doi: 10.1016/j.jfranklin.2020.03.024. doi: 10.1016/j.jfranklin.2020.03.024
|
| [14] | W. Zhou, Y. Sun, X. Zhang, P. Shi, Cluster synchronization of coupled neural networks with L$\acute{e}$vy noise via event-triggered pinning control, IEEE T. Neur. Net. Lear., 2021. doi: 10.1109/TNNLS.2021.3072475. |
| [15] |
G. Cena, A. Valenzano, Achieving round-robin access in controller area networks, IEEE T. Ind. Electron, 49 (2002), 1202–1213. doi: 10.1109/TIE.2002.804968. doi: 10.1109/TIE.2002.804968
|
| [16] |
M. E. M. B. Gaid, A. Cela, Y. Hamam, Optimal integrated control and scheduling of networked control systems with communication constraints: Application to a car suspension system, IEEE T. Contr. Syst. T., 14 (2006), 776–787. doi: 10.1109/TCST.2006.872504. doi: 10.1109/TCST.2006.872504
|
| [17] |
H. Q. Lu, Y. Hu, C. Q. Guo, W. N. Zhou, Cluster synchronization for a class of complex dynamical network system with randomly occurring coupling delays via an improved event-triggered pinning control approach, J. Franklin I., 357 (2020), 2167–2184. doi: 10.1016/j.jfranklin.2019.11.076. doi: 10.1016/j.jfranklin.2019.11.076
|
| [18] |
N. Li, Q. Li, J. H. Suo, Dynamic event-triggered $H_\infty$ state estimation for delayed complex networks with randomly occurring nonlinearities, Neurocomputing, 421 (2021), 97–104. doi: 10.1016/j.neucom.2020.08.048. doi: 10.1016/j.neucom.2020.08.048
|
| [19] | W. P. M. H. Heemels, K. H. Johansson, P. Tabuada, An introduction to event-triggered and self-triggered control, 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), 2012, 3270–3285. doi: 10.1109/CDC.2012.6425820. |
| [20] |
Z. X. Zhang, H. L. Liang, C. W. Wu, C. K. Ahn, Adaptive event-triggered output feedback fuzzy control for nonlinear networked systems with packet dropouts and actuator failure, IEEE T. Fuzzy Syst., 27 (2019), 1793–1806. doi: 10.1109/TFUZZ.2019.2891236. doi: 10.1109/TFUZZ.2019.2891236
|
| [21] |
Z. Gu, P. Shi, D. Yue, Z. T. Ding, Decentralized adaptive event-triggered $ h_\infty $ filtering for a class of networked nonlinear interconnected systems, IEEE T. Cybernetics., 49 (2018), 1570–1579. doi: 10.1109/TCYB.2018.2802044. doi: 10.1109/TCYB.2018.2802044
|
| [22] |
M. H. Zhu, S. Martinez, On the performance analysis of resilient networked control systems under replay attacks, IEEE T. Automat. Contr., 59 (2014), 804–808. doi: 10.1109/TAC.2013.2279896. doi: 10.1109/TAC.2013.2279896
|
| [23] |
Y. S. Tan, Q. Y. Liu, D. S. Du, B. Niu, S. M. Fei, Observer-based finite-time $ H_\infty $ control for interconnected fuzzy systems with quantization and random network Attacks, IEEE T. Fuzzy Syst., 29 (2019), 674–685. doi: 10.1109/TFUZZ.2019.2960719. doi: 10.1109/TFUZZ.2019.2960719
|
| [24] |
Y. H. Deng, H. Q. Lu, W. N. Zhou, Security event-triggered control for Markovian jump neural networks against actuator saturation and hybrid cyber attacks, J. Franklin I., 358 (2021), 7096–7118. doi: 10.1016/j.jfranklin.2021.07.022. doi: 10.1016/j.jfranklin.2021.07.022
|
| [25] |
C. De Persis, P. Tesi, Input-to-state stabilizing control under denial-of-service, IEEE T. Automat. Contr., 60 (2015), 2930–2944. doi: 10.1109/TAC.2015.2416924. doi: 10.1109/TAC.2015.2416924
|
| [26] |
E. Tian, C. Peng, Memory-based event-triggering $H_\infty$ load frequency control for power systems under deception attacks, IEEE T. Cybernetics, 50 (2020), 4610–4618. doi: 10.1109/TCYB.2020.2972384. doi: 10.1109/TCYB.2020.2972384
|
| [27] | D. Zhao, Z. D. Wang, G. L. Wei, Q. L. Han, A dynamic event-triggered approach to observer-based PID security control subject to deception attacks, Automatica, 120 (2020), 109128. doi: 10.1016/j.automatica.2020.109128. |
| [28] |
J. L. Liu, T. T. Yin, M. Q. Shen, X. P. Xie, J. Cao, State estimation for cyber–physical systems with limited communication resources, sensor saturation and denial-of-service attacks, ISA T., 104 (2020), 101–114. doi: 10.1016/j.isatra.2018.12.032. doi: 10.1016/j.isatra.2018.12.032
|
| [29] | M. M. Hamdan, M. S. Mahmoud, U. A. Baroudi, Event-triggering control scheme for discrete time cyberphysical systems in the presence of simultaneous hybrid stochastic attacks, ISA T., 2021. In press. doi: 10.1016/j.isatra.2021.04.027. |
| [30] |
R. Rakkiyappan, K. Sivaranjani, Sampled-data synchronization and state estimation for nonlinear singularly perturbed complex networks with time-delays, Nonlinear Dyn., 84 (2016), 1623–1636. doi: 10.1007/s11071-015-2592-1. doi: 10.1007/s11071-015-2592-1
|
| [31] |
K. Sivaranjani, R. Rakkiyappan, Delayed impulsive synchronization of nonlinearly coupled Markovian jumping complex dynamical networks with stochastic perturbations, Nonlinear Dyn., 88 (2017), 1917–1934. doi: 10.1007/s11071-017-3353-0. doi: 10.1007/s11071-017-3353-0
|














Figures(15) / Tables(1)

Yahan Deng, Zhenhai Meng, Hongqian Lu. Adaptive event-triggered state estimation for complex networks with nonlinearities against hybrid attacks[J]. AIMS Mathematics, 2022, 7(2): 2858-2877. doi: 10.3934/math.2022158







 DownLoad:
DownLoad: