In this paper, a dual sensing scheduling algorithm is proposed which is a modified version of VISA technique for sensing scheduling in road networks where targets can enter from both sides of the road. VISA and similar algorithms are based on the idea of designated entrance points and protection points and are very suitable for military scenarios. In comparison, civilian applications mostly use two-way roads and dual carriageways with entrance points on both ends of the roads calling for a modification of the VISA technique to make it suitable for two-way detection. The proposed algorithm achieves detection on a two-way road by using two parallel scan waves originating from the midpoint sensor on the road segment but in opposite directions. The proposed modification of the VISA algorithm improves the detection time by reducing it to half as compared to VISA but at the cost of decreased network lifetime. The proposed algorithm is also compared to Duty Cycling and Always-Awake schemes. In addition, a very simple hole handling method is proposed which applies a comprehensive labeling scheme on all the sensors of the road network represented as vertices in an undirected graph of road network.
Citation: Farhan Khan, Sing Kiong Nguang. Dual sensing scheduling algorithm for WSN based road network surveillance[J]. AIMS Electronics and Electrical Engineering, 2021, 5(1): 38-54. doi: 10.3934/electreng.2021003
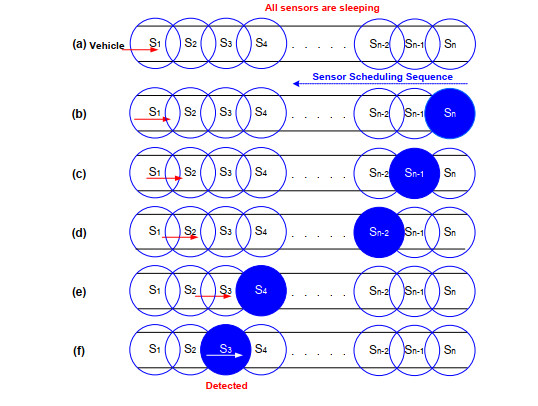
In this paper, a dual sensing scheduling algorithm is proposed which is a modified version of VISA technique for sensing scheduling in road networks where targets can enter from both sides of the road. VISA and similar algorithms are based on the idea of designated entrance points and protection points and are very suitable for military scenarios. In comparison, civilian applications mostly use two-way roads and dual carriageways with entrance points on both ends of the roads calling for a modification of the VISA technique to make it suitable for two-way detection. The proposed algorithm achieves detection on a two-way road by using two parallel scan waves originating from the midpoint sensor on the road segment but in opposite directions. The proposed modification of the VISA algorithm improves the detection time by reducing it to half as compared to VISA but at the cost of decreased network lifetime. The proposed algorithm is also compared to Duty Cycling and Always-Awake schemes. In addition, a very simple hole handling method is proposed which applies a comprehensive labeling scheme on all the sensors of the road network represented as vertices in an undirected graph of road network.

| [1] | Khan F, Nguang SK (2018) Dual Sensing Scheduling Algorithm for Wireless Sensor Network based Road Segment Surveillance. Proceedings of the 3rd EAI International Conference on Smart Grid and Innovative Frontiers in Telecommunications (SMARTGIFT 2018), 260-267. |
| [2] | Chen L, Li Y, Li Z, et al. (2014) Twice deployment node balance algorithm for road network surveillance. Int J Distrib Sens N 10: 1-8. |
| [3] | Abrams Z, Goel A, Plotkin S (2004) Set K-cover algorithms for energy efficient monitoring in wireless sensor networks. Proceedings of IEEE International Conference on Information Processing in Sensor Networks, 424-432. |
| [4] | Cardei M, Thai MT, Li Y, et al. (2005) Energy-efficient target coverage in wireless sensor networks. Proceedings of the 24th IEEE Annual Joint Conference of IEEE Computer and Communications Societies, 1976-1984. |
| [5] | Kumar S, Lai TH, Balogh J (2004) On K-coverage in a mostly sleeping sensor network. Proceedings of the 10th ACM Annual International Conference on Mobile Computing and Networking (MOBICOM), 144-158. |
| [6] |
Tian D, Georganas N (2003) A node scheduling scheme for energy conservation in large wireless sensor networks. Wireless Communications and Mobile Computing Journal 3: 271-290. doi: 10.1002/wcm.116

|
| [7] | Gui C, Mohapatra P (2004) Power conservation and quality of surveillance in target tracking sensor networks. Proceedings of the 10th ACM Annual International Conference on Mobile Computing and Networking (MobiCom), 129-143. |
| [8] |
Ren S, Li Q, Wang H, et al. (2005) Analyzing object tracking quality under probabilistic coverage in sensor networks. ACM Mobile Computing and Communications Review 9: 73-76. doi: 10.1145/1055959.1055971
|
| [9] | Cao Q, Abdelzaher T, He T, et al. (2005) Towards optimal sleep scheduling in sensor networks for rare event detection. Proceedings of the 4th IEEE/ACM International Symposium on Information Processing in Sensor Networks, 20-27. |
| [10] | Kumar S, Lai T, Arora A (2005) Barrier coverage with wireless sensors. Proceedings of the 11th ACM Annual International Conference on Mobile Computing and Networking (MobiCom), 284-298. |
| [11] | Rabbat MG, Nowak RD (2004) Decentralized source localization and tracking. Proceedings of IEEE International Conference on Acoustics, Speech, and Signal Processing, 921-924. |
| [12] | Chen WP, Hou JC, Sha L (2003) Dynamic clustering for acoutic target tracking in wireless sensor networks. Proceedings of the 11th IEEE International Conference on Network Protocols, 284-294. |
| [13] |
Yao K, Hudson RE, Reed CW, et al. (1998) Blind beamforming on a randomly distributed sensor array system. IEEE Journal of Selected Areas in Communications 16: 1555-1567. doi: 10.1109/49.730461
|
| [14] | Gui C, Mohapatra P (2005) Virtual patrol: A new power conservative design for surveillance using sensor networks. Proceedings of the 4th International Symposium on Information Processing in Sensor Networks, 246-253. |
| [15] | He T, Krishnamurthy S, Stankovic JA, et al. (2004) Energy-efficient surveillance system using wireless sensor networks. Proceedings of the 2nd International Conference on Mobile Systems, Applications and Services, 270-283. |
| [16] | Jeong J, Gu Y, He T, et al. (2009) VISA: Virtual scanning algorithm for dynamic protection of road networks. Proceedings of the 28th IEEE Conference on Computer Communications (InfoComm), 927-935. |
| [17] |
Jeong J, Gu Y, He T, et al. (2010) Virtual scanning algorithm for road network surveillance. IEEE T Parall Distr 21: 1734-1749. doi: 10.1109/TPDS.2010.60
|
| [18] | Fang Q, Gao J, Guibas LJ (2004) Locating and bypassing routing holes in sensor networks. Proceedings of the 23rd IEEE Conference on Computer Communications (InfoComm), 2458-2468. |
| [19] | Funke S, Klein C (2006) Hole detection or: "how much geometry hides in connectivity?" Proceedings of the 22nd ACM Annual Symposium on Computational Geometry, 377-385. |
| [20] | Khan F (2020) Localization in wireless sensor networks. PhD Thesis, The Univiersity of Auckland, Auckland, New Zealand. |














Figures(15) / Tables(2)

Farhan Khan, Sing Kiong Nguang. Dual sensing scheduling algorithm for WSN based road network surveillance[J]. AIMS Electronics and Electrical Engineering, 2021, 5(1): 38-54. doi: 10.3934/electreng.2021003







 DownLoad:
DownLoad: