Citation: Cem Kıncal, Zhenhong Li, Jane Drummond, Peng Liu, Trevor Hoey, Jan-Peter Muller. Landslide Susceptibility Mapping Using GIS-based Vector Grid File (VGF) Validating with InSAR Techniques: Three Gorges, Yangtze River (China)[J]. AIMS Geosciences, 2017, 3(1): 116-141. doi: 10.3934/geosci.2017.1.116

| [1] | Wahono B.F.D. (2010) Applications of Statistical and Heuristic Methods for Landslide Susceptibility Assessments : A case study in Wadas Lintang Sub District Wonosobo Regency, Central Java Province, Indonesia, Graduate School, Faculty of Geography, Gadjah Mada University and International Institute for Geo-information Science and Earth Observation. p. 106. |
| [2] |
Guzzetti F, Reichenbach P, Cardinali M, et al. (2005) Probabilistic landslide hazard assessment at the basin scale. Geomorphol 72: 272-299. doi: 10.1016/j.geomorph.2005.06.002

|
| [3] |
Chacon J, Irigaray C, Fernandez T, et al. (2006) Engineering geology maps: landslides and geographical information systems. Bull Eng Geol Environ 65: 341-411. doi: 10.1007/s10064-006-0064-z
|
| [4] | Radbruch DH (1970) Map of relative amounts of landslides in California, in US Geological Survey Open-File Report. p. 70-1485, 85-585. |
| [5] | Dobrovolny E (1971) Landslide susceptibility in and near anchorage as interpreted from topographic and geologic maps, in The Great Alaska Earthquake of 1964. Natl Acad Sci 735-745. |
| [6] | Nilsen TH and Wright RH (1979) Relative slope stability and landuse planning in the San Francisco Bay region, California. Prof Pap 103. |
| [7] | Brabb EE, Pampeyan EH, Bonilla MG (1972) Landslide Susceptibility in San Mateo County. California: U.S. Geological Survey. Misc Field Stud Map MF-360, Scale 1:62,500. |
| [8] |
Carrara A, Cardinali M, Detti R, et al. (1991) GIS Techniques and Statistical-Models in Evaluating Landslide Hazard. Earth Surf Processes Landforms 16: 427-445. doi: 10.1002/esp.3290160505
|
| [9] | Carrara A and Guzzetti F (1995) Geographical information systems in assessing natural hazards. Springer Neth 4: 45–59. |
| [10] | Chung CJF and Fabbri AG (1999) Probabilistic prediction models for landslide hazard mapping. Photogramm Eng Remote 65: 1389-1399. |
| [11] |
Guzzetti F, Carrara A, Cardinali M, et al. (1999) Landslide hazard evaluation: a review of current techniques and their application in a multi-scale study, Central Italy. Geomorphol 31: 181-216. doi: 10.1016/S0169-555X(99)00078-1
|
| [12] | Brabb EE (1993). Priorities for landslide during the international decade of hazard reduction. in Landslides : seventh international conference and field workshop. Rotterdam: Balkema. |
| [13] | Agostoni S, Laffi R, Mazzocola, et al. (1998). Landslide inventory data base for an Alpine area, Lombardia, Italy. in 8th IAEG Congress. Vancouver: A.A.Balkema. |
| [14] |
Chau KT, Lo KH, (2004) Hazard assessment of debris flows for Leung King Estate of Hong Kong by incorporating GIS with numerical simulations. NatHazards Earth Syst Sci 4: 103-116. doi: 10.5194/nhess-4-103-2004
|
| [15] |
Giardino M, Giordan D, Ambrogio S (2004) GIS technologies for data collection, management and visualization of large slope instabilities: two applications in the Western Italian Alps. Nat Hazards Earth Syst Sci 4: 197-211. doi: 10.5194/nhess-4-197-2004
|
| [16] |
Lee S, Chwae U, Min KD (2002) Landslide susceptibility mapping by correlation between topography and geological structure: the Janghung area, Korea. Geomorphol 46: 149-162. doi: 10.1016/S0169-555X(02)00057-0
|
| [17] |
Lee S, Choi J, Min K (2002) Landslide susceptibility analysis and verification using the Bayesian probability model. Environ Geol 43: 120-131. doi: 10.1007/s00254-002-0616-x
|
| [18] |
Süzen ML and Doyuran V (2004) A comparison of the GIS based landslide susceptibility assessment methods: multivariate versus bivariate. Environ Geol 45: 665-679. doi: 10.1007/s00254-003-0917-8
|
| [19] |
Ermini L, Catani F, Casagli N (2005) Artificial Neural Networks applied to landslide susceptibility assessment. Geomorphol 66: 327-343. doi: 10.1016/j.geomorph.2004.09.025
|
| [20] | Van Westen CJ, Van Ash TWJ, Soetoers R (2005) Landslide and risk zonation-why is it still so difficult? Bull Eng Geol Env 65: 167-184. |
| [21] |
Magliulo P, Di Lisio A, Russo F, et al. (2008) Geomorphology and landslide susceptibility assessment using GIS and bivariate statistics: a case study in southern Italy. Nat Hazards 47: 411-435. doi: 10.1007/s11069-008-9230-x
|
| [22] |
Kawabata D and Bandibas J (2009) Landslide susceptibility mapping using geological data, a DEM from ASTER images and an Artificial Neural Network (ANN). Geomorphol 113: 97-109. doi: 10.1016/j.geomorph.2009.06.006
|
| [23] |
Mejianavarro M, Wohl EE, Oaks SD (1994) Geological Hazards, Vulnerability, and Risk Assessment Using GIS - Model for Glenwood-Springs, Colorado. Geomorphol 10: 331-354. doi: 10.1016/0169-555X(94)90024-8
|
| [24] | Temesgen B, Mohammed MU, Korme T (2001) Natural hazard assessment using GIS and remote sensing methods, with particular reference to the landslides in the Wondogenet area, Ethiopia. Phys Chem Earth Part C-Solar-TerrestialPlanet Sci 26: 665-675. |
| [25] | Zhu AX, Wang RX, Qiao JP, et al. (2004) Mapping landslide susceptibility in the Three Gorges area, China using GIS, expert knowledge and fuzzy logic. IAHS Publ 289: 385-391. |
| [26] |
Kıncal C, Akgün A, Koca MY (2009) Landslide susceptibility assessment in the Izmir (West Anatolia,Turkey) city center and its near vicinity by the logistic regression method. Environ Earth Sci 59: 745–756. doi: 10.1007/s12665-009-0070-0
|
| [27] | Bai S-B, Wang J, Lü G-N, et al. (2010) GIS-based logistic regression for landslide susceptibility mapping of the Zhongxian segment in the Three Gorges area, China. Geomorphol 115, 23-31. |
| [28] | Yilmaz C, Topal T, Süzen ML (2012) GIS-based landslide susceptibility mapping using bivariate statistical analysis in Devrek (Zonguldak-Turkey) 65: 2161-2178. |
| [29] | Van Westen CJ (1993) Application of geographic information systems to landslide hazard zonation. University Delft Inter Instit. |
| [30] |
Süzen ML and Doyuran V (2004) Data driven bivariate landslide susceptibility assessment using geographical information systems: a method and application to Asarsuyu cathment, Turkey. Eng Geol 71: 303-321. doi: 10.1016/S0013-7952(03)00143-1
|
| [31] |
Chen W, Li X, Wang Y, et al. (2013) Landslide susceptibility mapping using LIDAR and DMC data: a case study in the Three Gorges area, China. Environ Earth Sci 70:673-685. doi: 10.1007/s12665-012-2151-8
|
| [32] |
Wu X, Niu R, Ren F, et al. (2013) Landslide susceptibility mapping using rough sets and back-propagation neural networks in the Three Gorges, China. Environ Earth Sci 70: 1307-1318. doi: 10.1007/s12665-013-2217-2
|
| [33] |
Kavzaoglu T, Sahin EK, Colkesen I (2014) Landslide susceptibility mapping using GIS-based multi-criteria decision analysis, support vector machines, and logistic regression. Landslides 11:425-439. doi: 10.1007/s10346-013-0391-7
|
| [34] |
Tehrany MS, Pradhan B, Jebur MN, (2014) Flood susceptibility ampping using a novel ensemble weights-of-evidence and support vector machine models in GIS. J Hydrol 512: 332-343. doi: 10.1016/j.jhydrol.2014.03.008
|
| [35] |
Wu X, Ren F, Niu R (2014) Landslide susceptibility assessment using object mapping units, decision tree, and support vector machine models in the Three Gorges of China. Environ Earth Sci 71: 4725-4738. doi: 10.1007/s12665-013-2863-4
|
| [36] | Du W, Wu Y, Liu J, et al. (2016) Landslide Susceptibility Mapping Using Support Vector Machine Model. Electron J Geotech Eng 21: 7069-7084. |
| [37] | Li J and Yi C (2005) The Magnificent Three Gorges Project. |
| [38] | Fuggle R and Smith WT (2000) Experience with dams in water and energy resource development in the People's Republic of China, Cape Town (South Africa), Secretariat of the World Commission on Dams. |
| [39] |
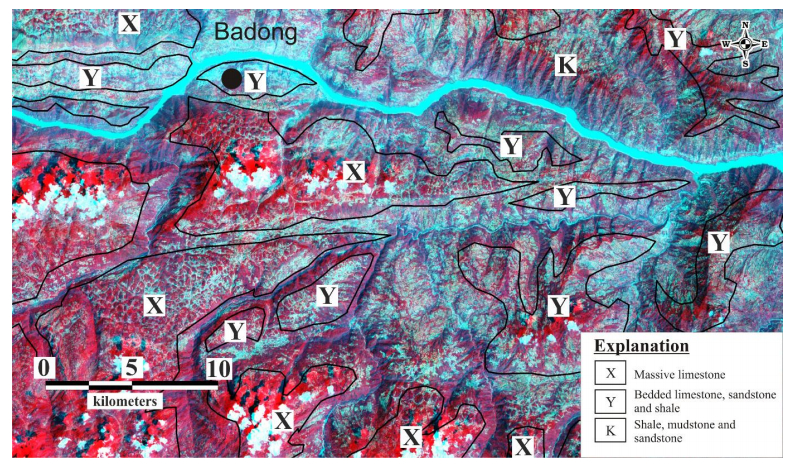
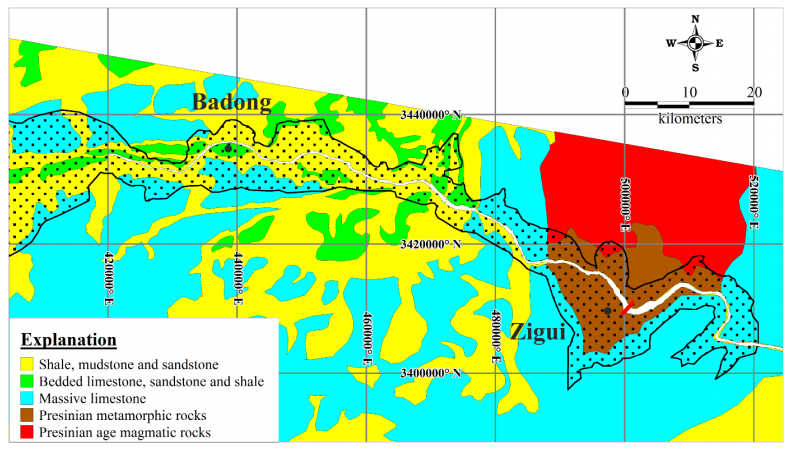
Liu JG, Mason PJ, Clerici N, et al. (2004) Landslide hazard assessment in the Three Gorges area of the Yangtze river using ASTER imagery: Zigui-Badong. Geomorphol 61: 171-187. doi: 10.1016/j.geomorph.2003.12.004
|
| [40] | Boyle CE (2007) Water-borne Illness in China. China Environmental Health Project, Research Brief. Washington, D.C.: Woodrow Wilson International Center for Scholars. |
| [41] | Chinese Three Gorges Project Corporation (CTGPC), (2002) Flooding on the Yangtze in 1998. April 20, 2002. Retrieved on February 8, 2008. (Chinese). |
| [42] | Ministry of Environmental Protection The People's Republic of China (MOEPTPRCa), (2010) Three Gorges Bulletin in 2009 Chapter 2 Economic and Social Development 2010-02-23. Available from: http://english.mep.gov.cn/standards_reports/threegorgesbulletin/. |
| [43] | Ministry of Environmental Protection The People's Republic of China (MOEPTPRCb), (2010) Three Gorges Bulletin in 2009 Chapter 3, State of the Natural Ecological Environment 2010-02-23. Available from: http://english.mep.gov.cn/standards_reports/threegorgesbulletin/. |
| [44] | Wu S, Wang H, Han J, et al. (2009) The Application of Fractal Dimensions of Landslide Boundary Trace for Evaluation of Slope Instability, in Landslide Disaster Mitigation in Three Gorges Reservoir, China, T.L. Fawu Wang, Editor. Springer-Verlag: Berlin. 465-474. |
| [45] | Xue G, Xu F, Wu Y, et al. (2009) Bank Slope Stability Evaluation for the Purpose of Three Gorges Reservoir Dam Construction. Springer Berl Heidelb 41-86. |
| [46] |
Wu SR, Shi L, Wang R, et al. (2001) Zonation of the landslide hazards in the for reservoir region of the Three Gorges Project on the Yangtze River. Eng Geol 59: 51-58. doi: 10.1016/S0013-7952(00)00061-2
|
| [47] | Wu S, Hu D, Chen Q, et al. (1997) Assessment of the crustal stability in the Qingjiang river basin of the western Hubei Province and its peripheral area, China. in Thirtieth International Geological Congress. Beijing, China: VSP International Science Publishers. |
| [48] |
Fourniadis IG and Liu JG (2007) Landslides in the Wushan-Zigui region of the Three Gorges, China. Q J Eng Geol Hydrogeol 40: 115-122. doi: 10.1144/1470-9236/06-035
|
| [49] | METI/ERSDAC (2010) Earth Remote Sensing Data Analysis Center. 24 August 2010 16 June 2010]; METI/ERSDAC]. Available from: http://www.ersdac.or.jp/GDEM/E/4.html. |
| [50] |
Stefanov WL, Ramsey MS, Christensen PR (2001) Monitoring urban land cover change: An expert system approach to land cover classification of semiarid to arid urban centers. Remote Sens Environ 77: 173-185. doi: 10.1016/S0034-4257(01)00204-8
|
| [51] |
Zhu GB and Blumberg DG (2002) Classification using ASTER data and SVM algorithms; The case study of Beer Sheva, Israel. Remote Sens Environ 80: 233-240. doi: 10.1016/S0034-4257(01)00305-4
|
| [52] |
Stefanov WL and Netzband M (2005) Assessment of ASTER land cover and MODIS NDVI data at multiple scales for ecological characterization of an and urban center. Remote Sens Environ 99: 31-43. doi: 10.1016/j.rse.2005.04.024
|
| [53] | U.S. Department of the Interior, U.S.G.S., (2010) USGS/EROS Find Data/Products and Data Available/ETM. 1 April 2010 [cited 2010 10 May 2010]; Available from: http://eros.usgs.gov/#/Find_Data/Products_and_Data_Available/ETM. |
| [54] | Irons JR (2010) The Landsat Program. National Aeronautics and Space Administration . 1 September 2010 [cited 2010 15 July 2010]; Available from: http://landsat.gsfc.nasa.gov/about/landsat7.html. |
| [55] |
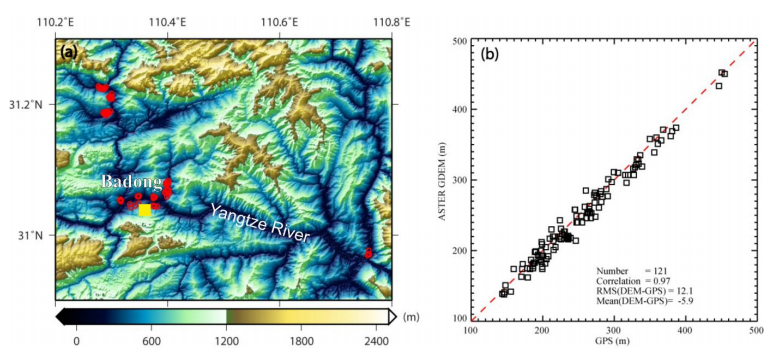
Li P, Shi C, Li Z, et al. (2013) Evaluation of ASTER GDEM using GPS benchmarks and SRTM in China. Int J Remote Sens 34: 1744-1771. doi: 10.1080/01431161.2012.726752
|
| [56] | Liu P, Li Z, Hoey T, et al. (2011) Using advanced InSAR time series techniques to monitor landslide movements in Badong of the Three Gorges region, China. Int J Appl Earth Obs Geoinform 21: 253-264. |
| [57] |
Dai FC, Lee CF, Li J, et al. (2001) Assessment of landslide susceptibility on the natural terrain of Lantau Island, Hong Kong. Environ Geol 40: 381-391. doi: 10.1007/s002540000163
|
| [58] |
Van Westen CJ, Rengers N, Soeters R (2003) Use of geomorphological information in indirect landslide susceptibility assessment. Nat Hazards 30: 399-419. doi: 10.1023/B:NHAZ.0000007097.42735.9e
|
| [59] | Ercanoglu M and Gokceoglu C (2004) Use of fuzzy relations to produce landslide susceptibility map of a landslide prone area (West Black Sea Region, Turkey). Eng Geol75: 229-250. |
| [60] |
Ayenew T and Barbieri G (2005) Inventory of landslides and susceptibility mapping in the Dessie area, northern Ethiopia. Eng Geol 77: 1-15. doi: 10.1016/j.enggeo.2004.07.002
|
| [61] |
Ayalew L and Yamagishi H (2005) The application of GIS-based logistic regression for landslide susceptibility mapping in the Kakuda-Yahiko Mountains, Central Japan. Geomorphol 65: 15-31. doi: 10.1016/j.geomorph.2004.06.010
|
| [62] |
Duman TY, Can T, Gökçeoğlu C, et al. (2006) Application of logistic regression for landslide susceptibility zoning of Cekmece Area, Istanbul, Turkey. Environ Geol 51: 241-256. doi: 10.1007/s00254-006-0322-1
|
| [63] |
Fourniadis IG, Liu JG, Mason PJ (2007) Regional assessment of landslide impact in the Three Gorges area, China, using ASTER data: Wushan-Zigui. Landslides 4: 267-278. doi: 10.1007/s10346-007-0080-5
|
| [64] | Wang F and Li T (Eds.) (2009) Landslide Disaster Mitigation in Three Gorges Reservoir, China. Mountain Res Dev 30: 184-185. |
| [65] | E.R.S.D.A. (2010) About ASTER G-DEM. Available from: http://www.ersdac.or.jp/GDEM/E/1.html. |
| [66] | Kıncal C (2005) Engineering Geological Evaluation of Geological Units in and Around Izmir City Center with the Help of Geographical Information Systems and Remote Sensing Techniques, in The Graduate School of Natural and Applied Sciences. Dokuz Eylul University Izmir. p. 342. |
| [67] |
Jimenez MJ, Fernandez MG, Zonno G, et al. (2000) Mapping soil effects in Barcelona, Spain, through an integrated GIS environment. Soil DynEarthq Eng 19: 289-301. doi: 10.1016/S0267-7261(00)00007-5
|
| [68] | Kıncal C, Koca MY, van Loon AJ (2009) Large-scale land-suitability mapping in the GIS environment for the construction site of the University Olympic Village in Izmir (Turkey). Geol 15: 189-198. |
| [69] | Heywood DI, Cornelius S, Carver S (2006) An introduction to geographical information systems. 3rd ed., Harlow, England ; New York: Pearson Prentice Hall. xxxiii, 426 p. |
| [70] |
Collins MG, Steiner FR, Rushman MJ (2001) Land-use suitability analysis in the United States: Historical development and promising technological achievements. Environ Manage 28: 611-621. doi: 10.1007/s002670010247
|
| [71] |
Sarkar S and Kanungo DP (2004) An integrated approach for landslide susceptibility mapping using remote sensing and GIS. Photogramm Eng Remote Sens 70: 617-625. doi: 10.14358/PERS.70.5.617
|
| [72] |
Pandy A, Dabral PP, Chowdary VM, et al. (2008) Landslide Hazard Zonation using Remote Sensing and GIS: a case study of Dikrong river basin, Arunachal Pradesh, India. Environ Geol 54: 1517-1529. doi: 10.1007/s00254-007-0933-1
|
| [73] |
Massonnet D and Feigl KL (1998) Radar interferometry and its application to changes in the earth's surface. Rev Geophys 36: 441-500. doi: 10.1029/97RG03139
|
| [74] | Hanssen RF (2001) Radar interferometry : data interpretation and error analysis. Remote sensing and digital image processing. Dordrecht ; Boston: Kluwer Academic. xviii, 308 |
| [75] |
Ferretti A, Prati C, Rocca F (2000) Nonlinear subsidence rate estimation using permanent scatterers in differential SAR interferometry. Ieee Trans Geosci Remote Sens 38: 2202-2212. doi: 10.1109/36.868878
|
| [76] |
Ferretti A, Prati C, Rocca F, (2001) Permanent scatterers in SAR interferometry. Ieee Trans Geosci Remote Sens 39: 8-20. doi: 10.1109/36.898661
|
| [77] |
Colesanti C, Ferretti A, Novali F, et al. (2003) SAR monitoring of progressive and seasonal ground deformation using the permanent scatterers technique. Ieee Trans GeosciRemote Sens 41: 1685-1701. doi: 10.1109/TGRS.2003.813278
|
| [78] | Kampes B (2005) Displacement Parameter Estimation using Permanent Scatterer Interferometry. Delft Univ Technol p. 168. |
| [79] | Hooper A, Zebker H, Segall P, et al. (2004) A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers. Geophys Res Lett 31: 5. |
| [80] | Hooper A, Segall P, Zebker H (2007) Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to Volcan Alcedo, Galapagos. J Geophys Res-Solid Earth 112: B07407. |
Figures(13) / Tables(5)

Cem Kıncal, Zhenhong Li, Jane Drummond, Peng Liu, Trevor Hoey, Jan-Peter Muller. Landslide Susceptibility Mapping Using GIS-based Vector Grid File (VGF) Validating with InSAR Techniques: Three Gorges, Yangtze River (China)[J]. AIMS Geosciences, 2017, 3(1): 116-141. doi: 10.3934/geosci.2017.1.116







 DownLoad:
DownLoad: