Citation: Mazin H. Aziz , Saad D. Al-Shamaa. Design and simulation of a CMOS image sensor with a built-in edge detection for tactile vision sensory substitution[J]. AIMS Electronics and Electrical Engineering, 2019, 3(2): 144-163. doi: 10.3934/ElectrEng.2019.2.144

| [1] | Kristjánsson Á, Moldoveanu A, Jóhannesson ÓI, et al. (2016) Designing sensory-substitution devices: Principles, pitfalls and potential1. Restor Neurol Neuros 34: 769–787. |
| [2] |
Bach-y-Rita P, Kercel SW (2003) Sensory substitution and the human–machine interface.Trends Cogn Sci 7: 541–546. doi: 10.1016/j.tics.2003.10.013

|
| [3] |
Way TP, Barner KE (1997) Automatic Visual to Tactile Translation, Part I: Human Factors, Access Methods, and Image Manipulation. IEEE TRANSACTIONS ON REHABILITATION ENGINEERING 5: 81–94. doi: 10.1109/86.559353
|
| [4] | Velázquez R (2010) Wearable assistive devices for the blind. In: Wearable and autonomous biomedical devices and systems for smart environment, pp. 331–349, Springer. |
| [5] |
Krufka SE, Barner KE, Aysal TC (2007) Visual to tactile conversion of vector graphics. IEEE Transactions on Neural Systems and Rehabilitation Engineering 15: 310–321. doi: 10.1109/TNSRE.2007.897029
|
| [6] | Ivanchenko V, Coughlan JM, Shen H (2008) Detecting and locating crosswalks using a camera phone. In: 2008 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, pp. 1–8. |
| [7] |
Bourbakis N (2008) Sensing surrounding 3-D space for navigation of the blind. IEEE Engineering in Medicine and Biology Magazine 27: 49–55. doi: 10.1109/MEMB.2007.901780
|
| [8] | Balakrishnan G, Sainarayanan G, Nagarajan R, et al. (2007) Wearable Real-Time Stereo Vision for the Visually Impaired. Engineering Letters 14: 6–14. |
| [9] | Kajimoto H, Kanno Y, Tachi S (2006) Forehead Electro-tactile Display for Vision Substitution. In: Proc EuroHaptics. |
| [10] | Kong JS, Kim SH, Sung DK, et al. (2016) A 160×20 Light-Adaptive CMOS Vision Chip for Edge Detection Based on a Retinal Structure Using a Saturating Resistive Network. ETRI Journal 29: 59–69. |
| [11] | Katic N, Schmid A, Leblebici Y (2014) A retina-inspired robust on-focal-plane multi-band edge-detection scheme for CMOS image sensors. In: 2014 IEEE 57th International Midwest Symposium on Circuits and Systems (MWSCAS), pp. 683–686. |
| [12] | Jose J, Farrajota M, Rodrigues JMF, et al. (2011) The SmartVision local navigation aid for blind and visually impaired persons. International Journal of Digital Content Technology and its Applications 5: 362–375. |
| [13] | Kajimoto H, Suzuki M, Kanno Y (2014) HamsaTouch: Tactile vision substitution with smartphone and electro-tactile display. In: Proceedings of the Extended Abstracts of the 32nd annual ACM conference on Human Factors in Computing Systems, pp. 1273–1278. |
| [14] | Pereira MC, Kassab F (2006) An electrical stimulator for sensory substitution. In: 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 6016–6020. |
| [15] | Rao AS, Gubbi J, Palaniswami M, et al. (2016) A vision-based system to detect potholes and uneven surfaces for assisting blind people. In: 2016 IEEE International Conference on Communications (ICC), pp. 1–6. |
| [16] | Roth P, Richoz D, Petrucci LS, et al. (2001) An audio-haptic tool for non-visual image representation. In: Proceedings of the 6th International Symposium on Signal Processing and Its Applications 1: 64–67. |
| [17] | Way TP, Barner KE (1997) Automatic Visual to Tactile Translation, Part II: Evaluation of the TACTile Image Creation System. International Conference of the IEEE Engineering in Medicine and Biology Society 5: 95–105. |
| [18] | du Buf JMH, Barroso J, Rodrigues JMF, et al. (2011) The SmartVision Navigation Prototype for Blind Users. International Journal of Digital Content Technology and its Applications 5: 351–361. |
| [19] | Hir JL, Kolar A, Santos FVD (2017) Distributed mixed-signal architecture for programmable smart image sensors. In: 2017 15th IEEE International New Circuits and Systems Conference (NEWCAS), pp. 353–356. |
| [20] |
Grewe L, Overell W (2017) Road following for blindBike: an assistive bike navigation system for low vision persons. In: Signal Processing, Sensor/Information Fusion, and Target Recognition XXVI 10200: 1020011. doi: 10.1117/12.2264548
|
| [21] | Fossum ER (1998) Digital camera system on a chip. IEEE Micro 18: 8–15. |
| [22] |
Elouardi A, Bouaziz S, Dupret A, et al. (2007) Time comparison in image processing: APS sensors versus an artificial retina based vision system. Meas Sci Technol 18: 2817–2826. doi: 10.1088/0957-0233/18/9/011
|
| [23] | Gonda M, Jarvis R (2000) Tactile Vision-Development of a Wearable Prosthesis for the Blind. In: Australian Conference on Robotics and Automation, pp. 71–74. |
| [24] | Elouardi A, Bouaziz S, Dupret A, et al. (2004) Image processing vision system implementing a smart sensor. In: Proceedings of the 21st IEEE Instrumentation and Measurement Technology Conference (IEEE Cat. No.04CH37510) 1: 445–450. |
| [25] |
El Gamal A, Yang DXD, Fowler BA (1999) Pixel Level Processing - Why, What, and How? In:Sensors, Cameras, and Applications for Digital Photography 3650: 2–13. doi: 10.1117/12.342849
|
| [26] | Loose M, Meier K, Schemmel J (1996) Camera with analog adaptive photoreceptors for a tactile vision aid. In: Intelligent Robots and Computer Vision XV: Algorithms, Techniques, Active Vision, and Materials Handling 20904: 528–537. |
| [27] | Nixon RH, Kemeny SE, Pain B, et al. (1996) 256×256 CMOS Active Pixel Sensor Camera-on-a-Chip. In: 1996 IEEE International Solid-State Circuits Conference. Digest of Technical Papers (ISSCC) 31: 2046–2050. |
| [28] | Hong CS (2001) On-chip spatial image processing with CMOS active pixel sensors. PhD Thesis, Waterloo, Ontario, Canada. |
| [29] | Lichtsteiner P, Posch C, Delbruck T (2006) A 128 X 128 120db 30mw asynchronous vision sensor that responds to relative intensity change. In: 2006 IEEE International Solid State Circuits Conference - Digest of Technical Papers 39: 2060–2069. |
| [30] |
Amhaz H, Sicard G (2012) New smart readout technique performing edge detection designed to control vision sensors dataflow. In: Sensors, Cameras, and Systems for Industrial and Scientific Applications XIII 8298: 82980N. International Society for Optics and Photonics. doi: 10.1117/12.909553
|
| [31] | Cho DID, LEE TJ (2015) A Review of Bioinspired Vision Sensors and Their Applications.Sensors and Materials 27: 447–463. |
| [32] | Nixon M, Aguado A (2008) Feature Extraction and Image Processing (2nd ed.). Orlando, FL, USA: Academic Press, Inc. |
| [33] | Lee TH (2007) Edge Detection Analysis. IJCSI International Journal of Computer Science Issues 5: 1–25. |
| [34] | Juneja M, Sandhu P (2009) Performance evaluation of edge detection techniques for images in spatial domain. International Journal of Computer Theory and Engineering 1: 614–622. |
| [35] |
Desai NR, Hoang KV, Sonek GJ (1993) Applications of PSPICE Simulation Software to the Study of Optoelectronic Integrated Circuits and Devices. IEEE Transactions on Education 36: 357–362. doi: 10.1109/13.241611
|
| [36] | Neifeld MA, Chou WC (1998) SPICE-Based Optoelectronic System Simulation. Applied optics37: 6093–6104. |
| [37] | Navarro D, Feng Z, Viswanathan V, et al. (2011) Image toolbox for CMOS image sensors simulations in Cadence ADE. In: International Conference on Design and Modeling in Science, Education, and Technology: DeMset, p. 5. |
| [38] | Feng Z, Viswanathan V, Navarro D (2012) Image Sensor Matrix High Speed Simulation. World Academy of Science, Engineering and Technology International Journal of Electrical, Computer, Energetic, Electronic and Communication Engineering 6: 1244–1247. |
| [39] | Navarro D, Feng Z, O'Connor I (2013) Image Toolbox for CMOS Image Sensors Fast Simulation. Global Journal of Computer Science and Technology , Graphics & Vision 13: 1–6. |
| [40] | Jha M, Charaya N, Dahiya S (2016) Design and Analysis CMOS Image Sensor. International Journal of Engineering Science Invention 5: 69–72. |
| [41] | Suthar K, Thakker R (2018) A New Global Shutter 8T CIS Architecture with CDS Operation. In:Proceedings of the International Conference on Intelligent Systems and Signal Processing, Advances in Intelligent Systems and Computing, pp. 113–124. |
| [42] | Feng Z (2014) Fast Scalable and Variability Aware CMOS Image Sensor Simulation Methodology. PhD Thesis, Automatique Institut des Nanotechnologies de Lyon. |
| [43] | Feng Z, Navarro D, O'Connor I (2015) A new method for Image sensor simulation. Available from: https://www.researchgate.net/publication/265062241_A_new_method_for_Image_sensor_simul ation. |
| [44] | Ohta J (2007) Smart CMOS Image Sensors and Applications. (B. J. Thompson, Ed.) CRC Press. |
| [45] | Fossum ER (1993) Active Pixel Sensors : Are CCDs dinosaurs? In: Charge-Coupled Devices and Solid State Optical Sensors III 1900: 2–15. |
| [46] | Fossum ER (1995) CMOS Image Sensors: Electronic Camera On A Chip. In: Proceedings of International Electron Devices Meeting, pp. 17–25. |
| [47] |
Dipti, Mehra R, Sehgal D (2016) Optimized Design of Active Pixel Sensor using CMOS 180 nm Technology. International Journal of Advanced Research in Computer and Communication Engineering 5: 423–426. doi: 10.17148/IJARCCE.2016.51297
|
| [48] | Choi B, Kim S, Lee J, et al. (2018) Complementary Metal Oxide Semiconductor Image Sensor Using Gate / Body-tied P-channel Metal Oxide Semiconductor Field Effect Transistor-type Photodetector for High-speed Binary Operation. Sensor Mater 30: 129–134. |
| [49] | Choi B, Jo S, Bae M, et al. (2016) Binary CMOS image sensor with a gate/body-tied MOSFET-type photodetector for high-speed operation. In: Image Sensing Technologies: Materials, Devices, Systems, and Applications 9854: 98540Z. |
| [50] | Jo S, Bae M, Choi B (2015) Linear-Logarithmic Wide-Dynamic-Range Active Pixel Sensor with Negative Feedback Structure Using Gate / Body-Tied Photodetector with an Overlapping Control Gate. Sensor Mater 27: 97–105. |
| [51] |
Goiffon V, Estribeau M, Michelot J, et al. (2014) Pixel level characterization of pinned photodiode and transfer gate physical parameters in CMOS image sensors. IEEE Journal of the Electron Devices Society 2: 65–76. doi: 10.1109/JEDS.2014.2326299
|
| [52] |
Fossum ER, Hondongwa DB (2014) A review of the pinned photodiode for CCD and CMOS image sensors. IEEE Journal of the Electron Devices Society 2: 33–43. doi: 10.1109/JEDS.2014.2306412
|
| [53] |
Structures C, Murari K, Member S, et al. (2009) Which Photodiode to Use : A Comparison of.IEEE SENSORS JOURNAL 9: 752–760. doi: 10.1109/JSEN.2009.2021805
|
| [54] | Chowdhury S, Banerjee A (2008) A high speed 8 transistor full adder design using novel 3 transistor XOR gates. International Journal of Electronics and Communication Engineering 2: 2244–2250. |
| [55] | Tabet M (2002) Double Sampling Techniques for CMOS Image Sensors. University of Waterloo. |
| [56] |
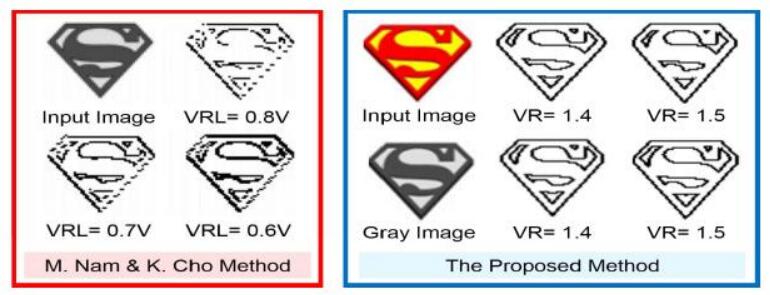
Nam M, Cho K (2018) Implementation of real-time image edge detector based on a bump circuit and active pixels in a CMOS image sensor. Integration 60: 56–62. doi: 10.1016/j.vlsi.2017.07.005
|
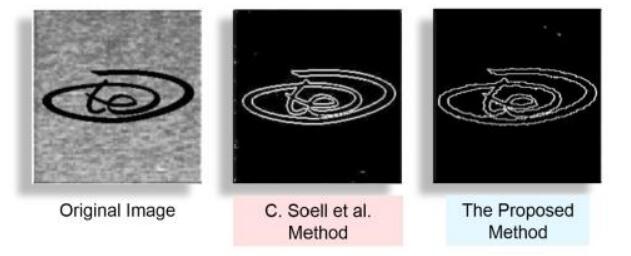
| [57] | Soell C, Shi L, Roeber J, et al. (2016) Low-power analog smart camera sensor for edge detection. In: 2016 IEEE International Conference on Image Processing (ICIP), pp. 4408–4412. |
| [58] |
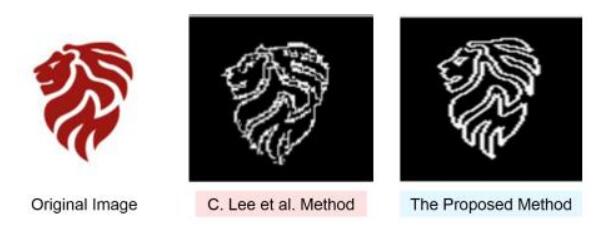
Lee C, Chao W, Lee S, et al. (2015) A Low-Power Edge Detection Image Sensor Based on Parallel Digital Pulse Computation. IEEE Transactions on Circuits and Systems II: Express Briefs 62: 1043–1047. doi: 10.1109/TCSII.2015.2455354
|
| [59] |
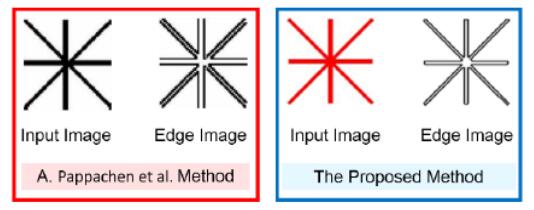
James A, Pachentavida A, Sugathan S (2014) Edge detection using resistive threshold logic networks with CMOS flash memories. International Journal of Intelligent Computing and Cybernetics 7: 79–94. doi: 10.1108/IJICC-06-2013-0032
|
Figures(24) / Tables(1)

Mazin H. Aziz , Saad D. Al-Shamaa. Design and simulation of a CMOS image sensor with a built-in edge detection for tactile vision sensory substitution[J]. AIMS Electronics and Electrical Engineering, 2019, 3(2): 144-163. doi: 10.3934/ElectrEng.2019.2.144







 DownLoad:
DownLoad: