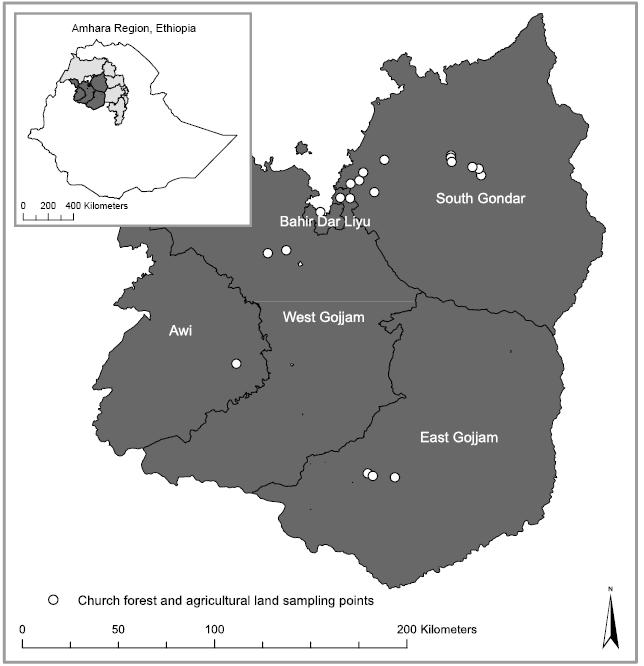
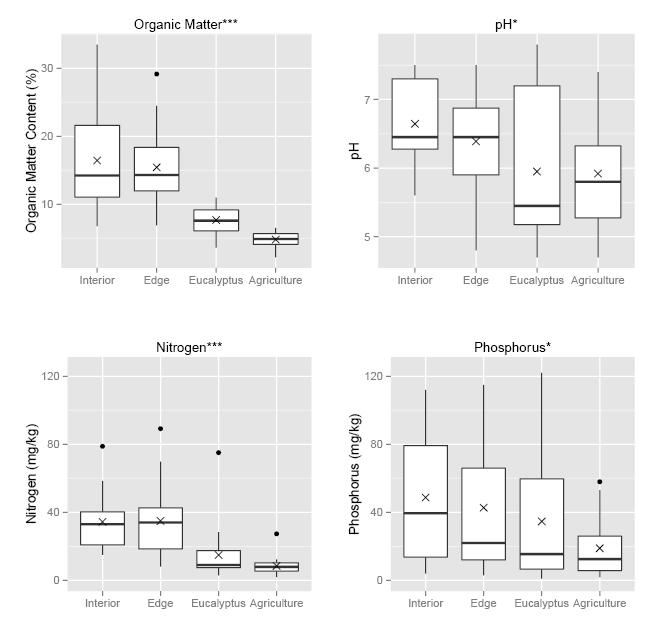
Citation: Janice Liang, Travis Reynolds, Alemayehu Wassie, Cathy Collins, Atalel Wubalem. Effects of exotic Eucalyptus spp. plantations on soil properties in and around sacred natural sites in the northern Ethiopian Highlands[J]. AIMS Agriculture and Food, 2016, 1(2): 175-193. doi: 10.3934/agrfood.2016.2.175

| [1] | Stanturf JA, Vance ED, Fox TR, et al. (2013) Eucalyptus beyond Its Native Range: Environmental Issues in Exotic Bioenergy Plantations. Int J For Res 2013:463030. |
| [2] | Zegeye H (2010) Environmental and Socio-economic Implications of Eucalyptus in Ethiopia. Ethiop Inst Agric Res2010: 184-205. |
| [3] | Pohjonen V (1989) Establishment of fuelwood plantations in Ethiopia. Silva Cerelica 14: 1-388. |
| [4] | Leicach SR, Grass MAY, Chludil HD, et al. (2012) Chemical Defenses in Eucalyptus Species: A Sustainable Strategy Based on Antique Knowledge to Diminish Agrochemical Dependency. New Advances and Contributions to Forestry Research. INTECH Open Access Publisher. |
| [5] |
Zhang C, Fu S (2009) Allelopathic effects of eucalyptus and the establishment of mixed stands of eucalyptus and native species. For Ecol Manag 258: 1391-1396. doi: 10.1016/j.foreco.2009.06.045

|
| [6] | Yitaferu B, Abewa A, Amare T (2013) Expansion of Eucalyptus Woodlots in the Fertile Soils of the Highlands of Ethiopia: Could It Be a Treat on Future Cropland Use?. J Agric Sci 5: 97-107. |
| [7] | Bean C, Russo MJ. Element Stewardship Abstract for Eucalyptus globlus. The Nature Conservancy, 1989. Available from: http://www.invasive.org/gist/esadocs/documnts/eucaglo.pdf |
| [8] | Davidson J (1989) The Eucalyptus Dilemma: Arguments For and Against Eucalypt Planting in Ethiopia. Eur Econ Rev 50: 1245-1277. |
| [9] | Dessie G, Erkossa T (2011) Eucalyptus in East Africa. FAO. |
| [10] | Palmberg C (2002) Annotated Bibliography on Environmental, Social and Economic Impacts of Eucalypts. FAO. |
| [11] |
Jagger P, Pender J (2003) The role of trees for sustainable management of less-favored lands: the case of eucalyptus in Ehtiopia. For Policy Econ 5: 83-95. doi: 10.1016/S1389-9341(01)00078-8
|
| [12] |
Kidanu S, Mamo T, Stroosnijder L (2005) Biomass production of Eucalyptus boundary plantations and their effect on crop productivity on Ethiopian highland Vertisols. Agroforestry Forum 63: 281-290. doi: 10.1007/s10457-005-5169-z
|
| [13] |
Harrington RA, Ewel JJ (1997) Invasibility of tree plantations by native and non-native plant species in Hawaii. For Ecol Manag 99: 153-162. doi: 10.1016/S0378-1127(97)00201-6
|
| [14] | Lemenih M, Kassa H (2014) Re-Greening Ethiopia: History, Challenges and Lessons. Forests 4: 1896-1909. |
| [15] | Chanie T, Collick AS, Adgo E, et al. (2013) Eco-hydrological impacts of Eucalyptus in the semi humid Ethiopian Highlands: the Lake Tana Plain. J Hydrol Hydromech 61: 21-29. |
| [16] |
Yirdaw E (2001) Diversity of naturally-regenerated native woody species in forest plantations in the Ethiopian highlands. New For 22: 159-177. doi: 10.1023/A:1015629327039
|
| [17] | Heilman P, Norby RJ (1997) Nutrient cycling and fertility management in temperate short rotation forest systems. Biomass Bioenerg 14: 361-371. |
| [18] | Zewdie M (2008) Temporal changes of biomass production, soil properties, and ground flora in Eucalyptus globulus plantations in the central highlands of Ethiopia. [PhD]. Uppsala: Swedish University of Agricultural Sciences. |
| [19] | Sunder SS (1993) The Ecological, Economic and Social Effects of Eucalyptus. FAO Corporate Document Repository1. |
| [20] | Poore MED, Fries C (1985) The ecological effects of eucalyptus. FAO For Paper 59. |
| [21] |
Nyssen J, Poesen J, Moeyersons J, et al. (2004) Human impact on the environment in the Ethiopian and Eritrean highlands -- a state of the art. Earth-Sci Rev 64: 273-320. doi: 10.1016/S0012-8252(03)00078-3
|
| [22] |
Pohjonen V, Pukkala T (1990) Eucalyptus globulus in Ethiopian Forestry. For Ecol Manag 36: 19-31. doi: 10.1016/0378-1127(90)90061-F
|
| [23] | Teshome T (2009) Is Eucalyptus Ecologically Hazardous Tree Species? Ethiop e-J Res Innov Foresight 1: 128-134. |
| [24] |
Teketay D (1992) Human impact on a natural montane forest in south eastern Ethiopia. Ethiop e-J ResInnov Foresight 1: 128-134. |
| [25] | Aerts R, Overtveld KV, November E, et al. (2016) Conservation of the Ethiopian church forests: Threats, opportunities, and implications for their management. Sci Total Environ551: 404-414. |
| [26] | Reynolds T, Sisay TS, Wassie A, et al. (2015) Sacred natural sites provide ecological libraries for landscape restoration and institutional models for biodiversity conservation. GSDR Brief. |
| [27] | Bongers F, Wassie A, Sterck FJ, et al. (2006) Ecological restoration and church forests in northern Ethiopia. J Drylands 1: 35-44. |
| [28] |
Wassie A, Sterck FJ, Bongers F (2010) Species and structural diversity of church forests in a fragmented Ethiopian Highland landscape. J Veg Sci 21: 938-948. doi: 10.1111/j.1654-1103.2010.01202.x
|
| [29] | Wassie A (2007) Ethiopian church forests: opportunities and challenges for restoration. The Netherlands: Wageningen University. |
| [30] | Mengist M (2011) Eucalyptus plantations in the highlands of Ethiopia revisited: A comparison of soil nutrient status after the first coppicing. Mountain Forestry Master Programme. |
| [31] | Schulte EE, Hopkins BG (1996) Estimation of soil organic matter by weight loss on ignition. Soil organic matter: Analysis and interpretation. Madison, WI: Soil Science Society of America. 21-32. |
| [32] | Mclean EO (1982) Soil pH and lime requirement. Methods of soil analysis. Madison, WI: ASA and SSSA. 199-223 |
| [33] | Dahnke WC (1990) Testing soils for available nitrogen. Soil testing and plant analysis. Madison, WI: Soil Science Society of America. 120-140. |
| [34] | Schlede H (1989) Distribution of acid soils and liming materials in Ethiopia. Ethiopian Institute of Geological Surveys. |
| [35] | Olsen SR, Sommers LE (1982) Phosphorus. Methods of soil analysis. Madison, WI: ASA and SSSA. 403-430. |
| [36] | Brady NC (1990) The Nature and Properties of Soils. New York, New York: Macmillan Publishing Company. |
| [37] | Mekonnen K, Glatzel G, Sieghardt M, et al. (2009) Soil Properties under Selected Homestead Grown Indigenous Tree and Shrub Species in the Highland Areas of Central Ethiopia. East Afr J Sci 3: 9-17. |
| [38] | Singwane SS, Malinga P (2012) Impacts of pine and eucalyptus forest plantations on soil organic matter content in Swaziland - Case of Shiselweni Forests. J Sustain Dev Afr 14: 137-151. |
| [39] | Bot A, Benites J (2005) The importance of soil organic matter: Key to drough-resistant soil and sustained food and production. FAO. |
| [40] |
Griffiths R, Madritch M, Swanson A (2009) The effects of topography on forest soil characteristics in the Oregon Cascade Mountains (USA): Implications for the effects of climate change on soil properties. For Ecol Manag 257: 1-7. doi: 10.1016/j.foreco.2008.08.010
|
| [41] | Garten C, Post W, Hanson P, et al. (1999) Forest carbon inventories and dynamics along a elevation gradient in the southern Appalachian Mountains. Biogeochemistry 45: 115-145. |
| [42] | Sims Z, Nielsen G (1986) Organic carbon in Montana soils related to clay content and climate. Soil Sci Soc Am J 50: 1261-1271. |
| [43] |
Ruiz-Sinoga JD, Romero-Diaz A (2010) Soil degradation factors along a Mediterranean physiometric gradient in Southern Spain. Geomorphology 118: 359-368. doi: 10.1016/j.geomorph.2010.02.003
|
| [44] | Raison R, Khanna P, Crane W (1982) Effects of intensified harvesting on rates of nitrogen and phosphorus removal from Pinus radiata and Eucalyptus forests in Australia and New Zealand. N Z J For Sci 12: 394-403. |
| [45] |
Reganold J, Elliott L, Unger Y (1987) Long-term effects of organic and conventional farming on soil erosion. Nature 330: 370-372. doi: 10.1038/330370a0
|
| [46] | Ravina da Silva M (2012) Impact of Eucalyptus plantations on pasture land on soil properties and carbon sequestration in Brazil. Uppsala: Swedish University of Agricultural Sciences. |
| [47] | Berthrong T, Jobbagy G, Jackson B (2009) A global meta-analysis of soil exchangeable cations, pH, carbon, and nitrogen with afforestation. Ecol Soc Am 19: 2228-2241. |
| [48] |
Faria G, Barros NFd, Ferreira R (2009) Soil fertility, organic carbon and fractions of the organic matter at different distances from Eucalyptus stumps. Revista Brasileria de Cencia dosolo 33: 571-579. doi: 10.1590/S0100-06832009000300010
|
| [49] |
Lemenih M, Gidyelew T, Teketay D (2004) Effect of canopy cover and understory environment of tree plantations on richness, density and size of colonizing woody species in southern Ethiopia. For Ecol Manag 194: 1-10. doi: 10.1016/j.foreco.2004.01.050
|
| [50] | Turner J, Lambert M (2000) Changing in organic carbon in forest plantations soils in eastern Australia. For EcolManag 133:231-247. |
| [51] |
Mensah AK (2015) Role of revegetation in restoring fertility of degraded mined soils in Ghana: A review. Int J Biodivers Convers 7: 57-80. doi: 10.5897/IJBC2014.0775
|
| [52] |
Michelsen A, Lisanework N, Friis I (1993) Impacts of tree plantations in the Ethiopian highland on soil fertility, shoot and root growth, nutrient utilisation and mycorrhizal colonisation. For Ecol Manag 61: 299-324. doi: 10.1016/0378-1127(93)90208-5
|
| [53] | Endale K (2011) Fertilizer Consumption and Agricultural Productivity in Ehiopia. Ethiopian Development Research Institute. |
| [54] | Valentin CF, Agus R, Alamban A,et al. (2008) Runoff and sediment losses from 27 upland catchments in Southeast Asia: Impact of rapid land use changes and conservation practices. Agric Ecosyst Environ 128: 225-238. |
| [55] |
Janeau JL, Gillard LC, Grellier S, et al. (2014) Soil erosion, dissolved organic carbon and nutrient losses under different land use systems in a small catchment in northern Vietnam. Agric Water Manag 146: 314-323. doi: 10.1016/j.agwat.2014.09.006
|
| [56] | Mailapalli DR, Burger M, Horwath WR, et al. (2013) Crop residue biomass effects on agricultural runoff. Appl Environ Soil Sci 2013: 805206. |
| [57] |
Lisanework N, Michelsen A (1993) Allelopathy in agroforestry systems: the effect of Cupressus lusitanica and three Eucalyptus species on Ethiopian crops. Agrofor Syst 21: 63-74. doi: 10.1007/BF00704926
|
| [58] | Joshi M, Palanisami K (2011) Impact of eucalyptus plantations on ground water availability in South Karnataka. ICID 21st International Congress on Irrigation and Drainage. Tehran, Iran. |
| [59] | Prabhakar VK (1998) Social and community forestry.Satish Garg. New Delhi. 90-106 |
| [60] |
Lal R (2007) Anthropogenic influences on world soils and implications to global food security. Adv Agron 93: 69-93. doi: 10.1016/S0065-2113(06)93002-8
|
| [61] | Wiebe K (2003) Linking land quality, agricultural productivity, and food security. United States Department of Agriculture, Agricultural Economic Report Number 823. |

Figures(3)

Janice Liang, Travis Reynolds, Alemayehu Wassie, Cathy Collins, Atalel Wubalem. Effects of exotic Eucalyptus spp. plantations on soil properties in and around sacred natural sites in the northern Ethiopian Highlands[J]. AIMS Agriculture and Food, 2016, 1(2): 175-193. doi: 10.3934/agrfood.2016.2.175







 DownLoad:
DownLoad: