For the UAV cluster task allocation problem, the particle swarm optimization algorithm has slow convergence speed, low fitness level, easy to fall into local minimum, and can not obtain the global optimal solution. Aiming at the shortcomings of the traditional particle swarm optimization algorithm, a quantized particle swarm optimization algorithm (named QPSO method) has been designed to adapt to the task allocation problem of UAV cluster in this paper. In this algorithm, the Schrodinger equation is used to construct the quantized particle motion rule, and the Monte Carlo method is used to construct the update mechanism of the quantized particle position. The experimental results show that in the three groups of experiments of reconnaissance, attack and damage, the proposed algorithm has high adaptability, fast convergence speed, reasonable task allocation of UAVs in the cluster, efficient use of UAVs, and the performance of QPSO algorithm is obviously better than the particle swarm optimization algorithm and the genetic algorithm.
Citation: Rongmei Geng, Renxin Ji, Shuanjin Zi. Research on task allocation of UAV cluster based on particle swarm quantization algorithm[J]. Mathematical Biosciences and Engineering, 2023, 20(1): 18-33. doi: 10.3934/mbe.2023002
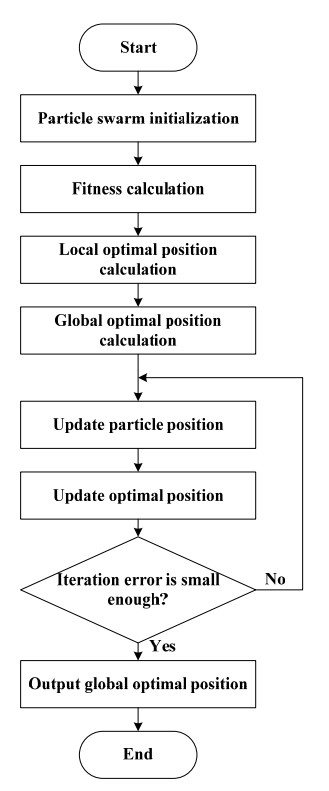
For the UAV cluster task allocation problem, the particle swarm optimization algorithm has slow convergence speed, low fitness level, easy to fall into local minimum, and can not obtain the global optimal solution. Aiming at the shortcomings of the traditional particle swarm optimization algorithm, a quantized particle swarm optimization algorithm (named QPSO method) has been designed to adapt to the task allocation problem of UAV cluster in this paper. In this algorithm, the Schrodinger equation is used to construct the quantized particle motion rule, and the Monte Carlo method is used to construct the update mechanism of the quantized particle position. The experimental results show that in the three groups of experiments of reconnaissance, attack and damage, the proposed algorithm has high adaptability, fast convergence speed, reasonable task allocation of UAVs in the cluster, efficient use of UAVs, and the performance of QPSO algorithm is obviously better than the particle swarm optimization algorithm and the genetic algorithm.

| [1] |
M. R. Khosravi, S. Samadi, Frame rate computing and aggregation measurement toward QoS/QoE in Video-SAR systems for UAV-borne real-time remote sensing, J. Supercomput., 77 (2021), 14565–14582. https://doi.org/10.1007/s11227-021-03869-3 doi: 10.1007/s11227-021-03869-3

|
| [2] |
P. J. Zarco-Tejada, V. González-Dugo, J. Berni, Fluorescence, temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera, Remote Sens. Environ., 1 (2012), 322–337. https://doi.org/10.1016/j.rse.2011.10.007 doi: 10.1016/j.rse.2011.10.007
|
| [3] |
H. Hamam, Energy efficient UAV flight path model for cluster head selection in next-generation wireless sensor networks, Sensors, 21 (2021), 606–615. https://doi.org/10.3390/s21248445 doi: 10.3390/s21248445
|
| [4] |
H. Wu, X. Tao, N. Zhang, X Shen, Cooperative UAV cluster-assisted terrestrial cellular networks for ubiquitous coverage, IEEE J. Sel. Areas Commun., 36 (2018), 2045–2058. https://doi.org/10.1109/JSAC.2018.2864418 doi: 10.1109/JSAC.2018.2864418
|
| [5] |
F. L. Duarte, R. C. De Lamare, C-RAN-type cluster-head-driven UAV relaying with recursive maximum minimum distance, IEEE Commun. Lett., 24 (2020), 2623–2627. https://doi.org/10.1109/LCOMM.2020.3009845 doi: 10.1109/LCOMM.2020.3009845
|
| [6] |
C. He, Z. Xie, C. Tian, A QoE-oriented uplink allocation for multi-UAV video streaming, Sensors, 19 (2019), 3394–3408. https://doi.org/10.3390/s19153394 doi: 10.3390/s19153394
|
| [7] |
H. A. L. Thi, D. M. Nguyen, T. P. Dinh, Globally solving a nonlinear UAV task assignment problem by stochastic and deterministic optimization approaches, Optim. Lett., 6 (2012), 315–329. https://doi.org/10.1007/s11590-010-0259-x doi: 10.1007/s11590-010-0259-x
|
| [8] |
P. Ma, E. Lee, M. Tsuchiya, A task allocation model for distributed computing systems, IEEE Trans. Comput., 31 (1982), 41–47. https://doi.org/10.1109/TC.1982.1675884 doi: 10.1109/TC.1982.1675884
|
| [9] |
Y. Jiang, Y. Zhou, W. Wang, Task allocation for undependable multiagent systems in social networks, IEEE Trans. Parallel Distrib. Syst., 24 (2013), 1671–1681. https://doi.org/10.1109/TPDS.2012.249 doi: 10.1109/TPDS.2012.249
|
| [10] | M. Theile, H. Bayerlein, R. Nai, D. Gesbert, M. Caccamo, UAV coverage path planning under varying power constraints using deep reinforcement learning, in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (2020), 1444–1449. https://doi.org/10.1109/IROS45743.2020.9340934 |
| [11] |
S. Yadav, R. Mohan, P. K. Yadav, Task allocation model for optimal system cost using fuzzy c-means clustering technique in distributed system, Ing. Syst. D Inf., 25 (2020), 59–68. https://doi.org/10.18280/isi.250108 doi: 10.18280/isi.250108
|
| [12] |
H. Kumar, I. Tyagi, Task allocation model based on hierarchical clustering and impact of different distance measures on the performance, Int. J. Fuzzy Syst. Appl., 9 (2020), 105–133. https://doi.org/10.4018/IJFSA.2020100105 doi: 10.4018/IJFSA.2020100105
|
| [13] | W. Fang, C. Wang, R. Zhao, Application of simulated annealing particle swarm optimization in complex three-dimensional path planning, in Journal of Physics: Conference Series, 1873 (2021), 012077. |
| [14] |
M. Yan, H. Yuan, J. Xu, Y. Yu, L. Jin, Task allocation and route planning of multiple UAVs in a marine environment based on an improved particle swarm optimization algorithm, EURASIP J. Adv. Signal Process., 2021 (2021), 1–23. https://doi.org/10.1186/s13634-021-00804-9 doi: 10.1186/s13634-021-00804-9
|
| [15] | W. Zhang, W. Zhang, Efficient UAV localization based on modified particle swarm optimization, in 2022 IEEE International Conference on Communications Workshops (ICC Workshops), (2022), 1089–1094. https://doi.org/10.1109/ICCWorkshops53468.2022.9814686 |
| [16] |
L. Zhou, S. Leng, Q. Liu, Q. Wang, Intelligent UAV swarm cooperation for multiple targets tracking, IEEE Internet Things J., 9 (2022), 743–754. https://doi.org/10.1109/JIOT.2021.3085673 doi: 10.1109/JIOT.2021.3085673
|
| [17] |
M. Asim, W. K. Mashwani, S. B. Belhaouari, S. Hassan, A novel genetic trajectory planning algorithm with variable population size for multi-UAV-assisted mobile edge computing system, IEEE Access, 9 (2022), 125569–125579. https://doi.org/10.1109/ACCESS.2021.3111318 doi: 10.1109/ACCESS.2021.3111318
|
| [18] |
M. Asim, M. ELAffendi, A. A. El-Latif, Multi-IRS and Multi-UAV-Assisted MEC System for 5G/6G Networks: Efficient Joint Trajectory Optimization and Passive Beamforming Framework, IEEE Trans. Intell. Transp. Syst., 9 (2022). https://doi.org/10.1109/TITS.2022.3178896 doi: 10.1109/TITS.2022.3178896
|







Figures(8) / Tables(3)

Rongmei Geng, Renxin Ji, Shuanjin Zi. Research on task allocation of UAV cluster based on particle swarm quantization algorithm[J]. Mathematical Biosciences and Engineering, 2023, 20(1): 18-33. doi: 10.3934/mbe.2023002







 DownLoad:
DownLoad: