Citation: Dingguo Chen, Lu Wang. Intelligent control schemes applied to Automatic Generation Control[J]. AIMS Energy, 2016, 4(3): 517-535. doi: 10.3934/energy.2016.3.517

| [1] |
Jiang L, Chi Y, Qin H, et al. (2011) Wind energy in China. IEEE Power Energy M 9: 36-46. doi: 10.1109/MPE.2011.942350

|
| [2] | Holttinen H, Orths A, Eriksen P, et al. (2011) Currents of change.IEEE Power Energy M9:47-59. |
| [3] |
Osborn D, Henderson M, Nickell B, et al. (2011) Driving forces behind wind. IEEE Power Energy M 9: 60-74. doi: 10.1109/MPE.2011.942474
|
| [4] | Lauby M, Ahlstrom M, Brooks D, et al. (2011) Balancing act. IEEE Power Energy M 9: 75-85. |
| [5] |
Zavadil R, Miller N, Ellis A, et al. (2011) Models for change. IEEE Power Energy M 9: 86-96. doi: 10.1109/MPE.2011.942388
|
| [6] | Ahlstrom M, Blatchford J, Davis M, et al. (2011) Atmospheric pressure. IEEE Power Energy M 9: 97-107. |
| [7] | Jaleeli N, VanSlyck L (1999) NERC’s new control performance standards. IEEE Trans Power Syst 14: 549-557. |
| [8] | Wang L, Chen D (2011) Extended–term dynamic simulation for AGC with smart grids. Proc IEEE PES General Meeting: 1-6. |
| [9] | Chen D (2010) Apparatus and method for predictive control of a power generation system. US7660640. |
| [10] | Golpira H, Bevrani H, Golpira H (2011) Application of GA optimization for automatic generation control design in an interconnected power system. Energ Convers Manage 52: 2247-2255. |
| [11] | Mohamed T, Bevrani H, Hassan A, et al. (2011) Decentralized model predictive based load frequency control in an interconnected power system. Energ Convers Manage 52: 1208-1214. |
| [12] | Zeynelgil H, Demiroren A, Sengor N (2002) The application of ANN technique to automatic generation control for multi-area power system. Int J Elec Power 24: 345-354. |
| [13] | Nanda J, Mangla A (2004) Automatic generation control of an interconnected hydro-thermal system using conventional integral and fuzzy logic controller. IEEE International Conf DRPT 1: 372-377. |
| [14] |
Green R (1996) Transformed automatic generation control. IEEE T Power Syst 11: 1799-1804. doi: 10.1109/59.544645
|
| [15] |
Schulte R (1996) An automatic generation modification for present demands on interconnected power systems. IEEE T Power Syst 11: 1286-1294. doi: 10.1109/59.535669
|
| [16] |
Tripathy S, Juengst K (1997) Sampled data automatic generation control with superconducting magnetic energy storage in power systems. IEEE Trans Energy Conversion 12: 187-192. doi: 10.1109/60.629702
|
| [17] |
Bakken B, Grande O (1998) Automatic generation control in a deregulated power system. IEEE T Power Syst 13: 1401-1406. doi: 10.1109/59.736283
|
| [18] |
Chown G, Hartman R (1998) Design and experience with a fuzzy logic controller for automatic generation control. IEEE T Power Syst 13: 965-970. doi: 10.1109/59.709084
|
| [19] | Shoults R, Yao M, Kelm R, et al. (1998) Improved system AGC performance with arc furnace steel mill loads. IEEE T Power Syst 13: 630-635. |
| [20] |
Yao M, Shoults R, Kelm R (2000) AGC logic based on NERC’s new control performance standard and disturbance control standard. IEEE T Power Syst 15: 852-857. doi: 10.1109/59.867184
|
| [21] |
Hain Y, Kulessky R, Nudelman G (2000) Identification-based power unit model for load-frequency control purposes. IEEE T Power Syst 15: 1313-1321. doi: 10.1109/59.898107
|
| [22] |
Gross G, Lee J (2001) Analysis of load frequency control performance assessment criteria. IEEE T Power Syst 16: 520-525. doi: 10.1109/59.932290
|
| [23] |
Donde V, Pai M, Hiskens I (2001) Simulation and optimization in an AGC system after deregulation. IEEE T Power Syst 16: 481-489. doi: 10.1109/59.932285
|
| [24] |
Trudnowski D, McReynolds W, Johnson J (2001) Real-time very short-term load prediction for power-system automatic generation control. IEEE T Contr Syst T 9: 254-260. doi: 10.1109/87.911377
|
| [25] |
Sasaki T, Enomoto K (2002) Dynamic analysis of generation control performance standards. IEEE T Power Syst 17: 806-811. doi: 10.1109/TPWRS.2002.800946
|
| [26] | Hoonchareon N, Ong C, Kramer R (2002) Implementation of an ACE1 decomposition method. IEEE T Power Syst 17: 757-761. |
| [27] | Rodriguez-Amenedo J, Arnalte S, Burgos J (2002) Automatic generation control of a wind farm with variable speed wind turbines. IEEE T Energy Conver 17: 279-284. |
| [28] |
Chang-Chien L, Hoonchareon N, Ong C, et al. (2003) Estimation of Beta for adaptive frequency bias setting in load frequency control. IEEE T Power Syst 18: 904-911. doi: 10.1109/TPWRS.2003.810996
|
| [29] |
Chang-Chien L, Ong C, Kramer R (2003) Field test and refinements of an ACE model. IEEE T Power Syst 18: 898-903. doi: 10.1109/TPWRS.2003.810997
|
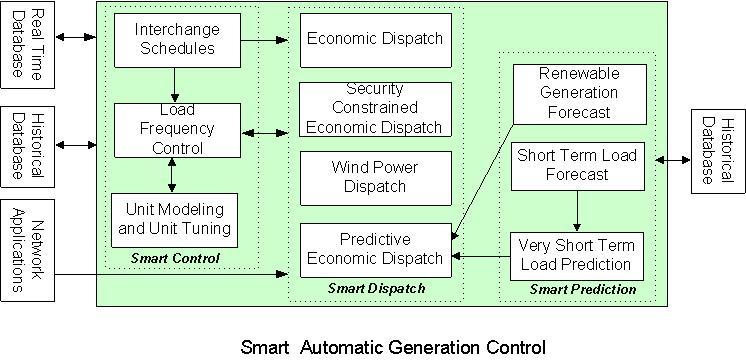
| [30] | Chen D, Kumar S, York M, et al. (2012) Smart Automatic Generation Control. IEEE PES General Meeting, 1-6. |
| [31] | Chen D, York M (2008) Neural network based approaches to very short term load prediction. IEEE PES General Meeting, 1-8. |
| [32] | Chen D, York M (2011) Predictive economic dispatch with time. IEEE PES General Meeting, 1-8. |
| [33] | Chen D (1998) Nonlinear neural control with power systems applications. PhD Dissertation, Oregon State University, Corvallis, USA. |
| [34] | Vedam R (1994) Nonlinear control applied to power systems. PhD Dissertation, Oregon State University, Corvallis, USA. |
Figures(6) / Tables(3)

Dingguo Chen, Lu Wang. Intelligent control schemes applied to Automatic Generation Control[J]. AIMS Energy, 2016, 4(3): 517-535. doi: 10.3934/energy.2016.3.517







 DownLoad:
DownLoad: