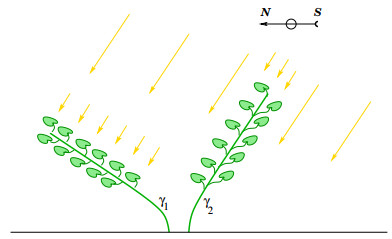
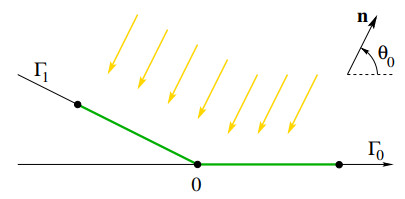
The paper is concerned with a shape optimization problem, where the functional to be maximized describes the total sunlight collected by a distribution of tree leaves, minus the cost for transporting water and nutrient from the base of trunk to all the leaves. In a 2-dimensional setting, the solution is proved to be unique and explicitly determined.
Citation: Alberto Bressan, Sondre Tesdal Galtung. A 2-dimensional shape optimization problem for tree branches[J]. Networks and Heterogeneous Media, 2021, 16(1): 1-29. doi: 10.3934/nhm.2020031
The paper is concerned with a shape optimization problem, where the functional to be maximized describes the total sunlight collected by a distribution of tree leaves, minus the cost for transporting water and nutrient from the base of trunk to all the leaves. In a 2-dimensional setting, the solution is proved to be unique and explicitly determined.

| [1] | M. Bernot, V. Caselles and J.-M. Morel, Optimal Transportation Networks. Models and Theory, Springer Lecture Notes in Mathematics 1955, Berlin, 2009. |
| [2] |
The structure of branched transportation networks. Calc. Var. Partial Differential Equations (2008) 32: 279-317. 
|
| [3] |
Fractal regularity results on optimal irrigation patterns. J. Math. Pures Appl. (2014) 102: 854-890.
|
| [4] |
Optimal energy scaling for micropatterns in transport networks. SIAM J. Math. Anal. (2017) 49: 311-359.
|
| [5] |
An equivalent path functional formulation of branched transportation problems. Discrete Contin. Dyn. Syst. (2011) 29: 845-871.
|
| [6] |
Competition models for plant stems. J. Differential Equations (2020) 269: 1571-1611.
|
| [7] |
A. Bressan, M. Palladino and Q. Sun, Variational problems for tree roots and branches, Calc. Var. Partial Differential Equations, 59 (2020), Paper No. 7, 31 pp. doi: 10.1007/s00526-019-1666-1
|
| [8] | A. Bressan and B. Piccoli, Introduction to the Mathematical Theory of Control, AIMS Series in Applied Mathematics, Springfield Mo. 2007. |
| [9] |
On the optimal shape of tree roots and branches. Math. Models & Methods Appl. Sci. (2018) 28: 2763-2801.
|
| [10] | A. Bressan and Q. Sun, Weighted irrigation plans, submitted., |
| [11] |
L. Cesari, Optimization - Theory and Applications, Springer-Verlag, 1983. doi: 10.1007/978-1-4613-8165-5
|
| [12] |
Some remarks on the fractal structure of irrigation balls. Adv. Nonlinear Stud. (2019) 19: 55-68.
|
| [13] |
Minimum cost communication networks.. Bell System Tech. J. (1967) 46: 2209-2227.
|
| [14] |
A variational model of irrigation patterns. Interfaces Free Bound. (2003) 5: 391-415.
|
| [15] |
The regularity of optimal irrigation patterns. Arch. Ration. Mech. Anal. (2010) 195: 499-531.
|
| [16] |
A fractal shape optimization problem in branched transport. J. Math. Pures Appl. (2019) 123: 244-269.
|
| [17] |
Optimal channel networks, landscape function and branched transport. Interfaces Free Bound. (2007) 9: 149-169.
|
| [18] |
Optimal paths related to transport problems. Comm. Contemp. Math. (2003) 5: 251-279.
|
| [19] |
Interior regularity of optimal transport paths.. Calc. Var. Partial Differential Equations (2004) 20: 283-299.
|
| [20] |
Motivations, ideas and applications of ramified optimal transportation. ESAIM Math. Model. Numer. Anal. (2015) 49: 1791-1832.
|
Figures(12)
Alberto Bressan, Sondre Tesdal Galtung. A 2-dimensional shape optimization problem for tree branches[J]. Networks and Heterogeneous Media, 2021, 16(1): 1-29. doi: 10.3934/nhm.2020031







 DownLoad:
DownLoad: