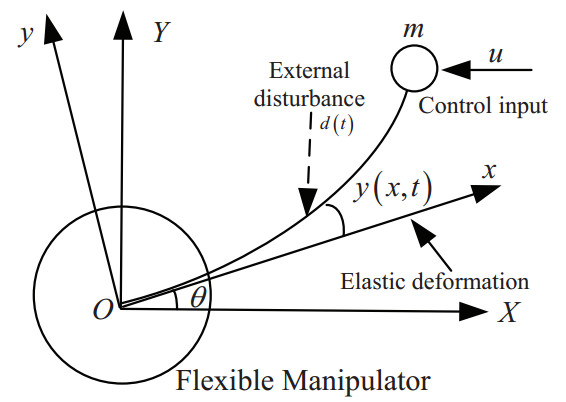
With the rapid development of smart campus, this paper studies the attitude tracking control of flexible manipulator (FM) in colleges and universities under elastic vibration and external disturbances. First, different from the traditional modeling based on ordinary differential equations (ODEs), the partial differential equations (PDEs) dynamic model of a manipulator system is established based on the Hamilton principle (HP). Second, the boundary control condition of the end system of the manipulator is introduced to adjust the vibration of the manipulator. Furthermore, a Proportional-Derivative (PD) boundary control (PDBC) strategy is proposed by the Lyapunov function to suppress the vibration of the manipulator. Finally, a numerical comparison simulation based on MATLAB/SIMULINK further verifies the robustness and anti-disturbance performance of the control method proposed in this paper.
Citation: Yunxia Wei, Yuanfei Zhang, Bin Hang. Construction and management of smart campus: Anti-disturbance control of flexible manipulator based on PDE modeling[J]. Mathematical Biosciences and Engineering, 2023, 20(8): 14327-14352. doi: 10.3934/mbe.2023641
With the rapid development of smart campus, this paper studies the attitude tracking control of flexible manipulator (FM) in colleges and universities under elastic vibration and external disturbances. First, different from the traditional modeling based on ordinary differential equations (ODEs), the partial differential equations (PDEs) dynamic model of a manipulator system is established based on the Hamilton principle (HP). Second, the boundary control condition of the end system of the manipulator is introduced to adjust the vibration of the manipulator. Furthermore, a Proportional-Derivative (PD) boundary control (PDBC) strategy is proposed by the Lyapunov function to suppress the vibration of the manipulator. Finally, a numerical comparison simulation based on MATLAB/SIMULINK further verifies the robustness and anti-disturbance performance of the control method proposed in this paper.

| [1] |
Z. Liu, S. Yang, C. Cheng, T. Ding, R. Chai, Study on modeling and dynamic performance of a planar flexible parallel manipulator based on finite element method, Math. Biosci. Eng., 20 (2023), 807–836. https://doi.org/10.3934/mbe.2023037 doi: 10.3934/mbe.2023037

|
| [2] |
T. Wang, Y. Tao, H. Liu, Current researches and future development trend of intelligent robot: A review, Int. J. Autom. Comput., 15 (2018), 525–546. https://doi.org/10.1007/s11633-018-1115-1 doi: 10.1007/s11633-018-1115-1
|
| [3] |
Q. Zhang, X. Zhao, L. Liu, T. Dai, Dynamics analysis of spatial parallel robot with rigid and flexible links, Math. Biosci. Eng., 17 (2020), 7101–7129. https://doi.org/10.3934/mbe.2020365 doi: 10.3934/mbe.2020365
|
| [4] |
A. Ollero, M. Tognon, A. Suarez, D. Lee, A. Franchi, Past, present, and future of aerial robotic manipulators, IEEE Trans. Rob., 38 (2021), 626–645. https://doi.org/10.1109/TRO.2021.3084395 doi: 10.1109/TRO.2021.3084395
|
| [5] |
S. Zaidi, M. Maselli, C. Laschi, M. Cianchetti, Actuation technologies for soft robot grippers and manipulators: A review, Curr. Rob. Rep., 2 (2021), 355–369. https://doi.org/10.1007/s43154-021-00054-5 doi: 10.1007/s43154-021-00054-5
|
| [6] | S. Booth, J. Tompkin, H. Pfister, J. Waldo, K. Gajos, R. Nagpal, Piggybacking robots: Human-robot overtrust in university dormitory security, in Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, (2017), 426–434. https://doi.org/10.1145/2909824.3020211 |
| [7] |
C. Kiang, A. Spowage, C. Yoong, Review of control and sensor system of flexible manipulator, J. Intell. Rob. Syst., 77 (2015), 187–213. https://doi.org/10.1007/s10846-014-0071-4 doi: 10.1007/s10846-014-0071-4
|
| [8] |
J. M. Martins, Z. Mohamed, M. O. Tokhi, J. Sa Da Costa, M. A. Botto, Approaches for dynamic modelling of flexible manipulator systems, IEE Proc.-Control Theory Appl., 150 (2003), 401–411. https://doi.org/10.1049/ip-cta:20030496 doi: 10.1049/ip-cta:20030496
|
| [9] | L. Tian, C. Collins, Adaptive neuro-fuzzy control of a flexible manipulator, Mechatronics, 15 (2005), 1305–1320. |
| [10] |
P. Li, Z. Lin, H. Shen, Z. Zhang, X. Mei, Optimized neural network based sliding mode control for quadrotors with disturbances, Math. Biosci. Eng., 18 (2021), 1774–1793. https://doi.org/10.3934/mbe.2021092 doi: 10.3934/mbe.2021092
|
| [11] |
S. K. Dwivedy, P. Eberhard, Dynamic analysis of flexible manipulators, a literature review, Mech. Mach. Theory, 41 (2006), 749–777. https://doi.org/10.1016/j.mechmachtheory.2006.01.014 doi: 10.1016/j.mechmachtheory.2006.01.014
|
| [12] |
Z. Zhao, X. He, C. Ahn, Boundary disturbance observer-based control of a vibrating single-link flexible manipulator, IEEE Trans. Syst. Man Cybern.: Syst., 51 (2019), 2382–2390. https://doi.org/10.1109/TSMC.2019.2912900 doi: 10.1109/TSMC.2019.2912900
|
| [13] |
W. He, H. Gao, C. Zhou, C. Yang, Z. Li, Reinforcement learning control of a flexible two-link manipulator: An experimental investigation, IEEE Trans. Syst. Man Cybern.: Syst., 51 (2020), 7326–7336. https://doi.org/10.1109/TSMC.2020.2975232 doi: 10.1109/TSMC.2020.2975232
|
| [14] |
T. Jiang, J. Liu, W. He, Boundary control for a flexible manipulator based on infinite dimensional disturbance observer, J. Sound Vib., 348 (2015), 1–14. https://doi.org/10.1016/j.jsv.2015.02.044 doi: 10.1016/j.jsv.2015.02.044
|
| [15] |
S. Moberg, J. Öhr, S. Gunnarsson, A benchmark problem for robust control of a multivariable nonlinear flexible manipulator, IFAC Proc. Vol., 41 (2008), 1206–1211. https://doi.org/10.3182/20080706-5-KR-1001.00208 doi: 10.3182/20080706-5-KR-1001.00208
|
| [16] |
T. Chen, J. Shan, Distributed control of multiple flexible manipulators with unknown disturbances and dead-zone input, IEEE Trans. Ind. Electron., 67 (2019), 9937–9947. https://doi.org/10.1109/TIE.2019.2955417 doi: 10.1109/TIE.2019.2955417
|
| [17] |
B. Hang, B. Su, W. Deng, Adaptive sliding mode fault-tolerant attitude control for flexible satellites based on ts fuzzy disturbance modeling, Math. Biosci. Eng., 20 (2023), 12700–12717. https://doi.org/10.3934/mbe.2023566 doi: 10.3934/mbe.2023566
|
| [18] |
S. K. Pradhan, B. Subudhi, Position control of a flexible manipulator using a new nonlinear self-tuning pid controller, IEEE/CAA J. Autom. Sin., 7 (2018), 136–149. https://doi.org/10.1109/JAS.2017.7510871 doi: 10.1109/JAS.2017.7510871
|
| [19] |
J. Yun, Y. Sun, C. Li, D. Jiang, B. Tao, G. Li, et al., Self-adjusting force/bit blending control based on quantitative factor-scale factor fuzzy-pid bit control, Alexandria Eng. J., 61 (2022), 4389–4397. https://doi.org/10.1016/j.aej.2021.09.067 doi: 10.1016/j.aej.2021.09.067
|
| [20] | B. A. M. Zain, M. O. Tokhi, S. F. Toha, Pid-based control of a single-link flexible manipulator in vertical motion with genetic optimisation, in 2009 Third UKSim European Symposium on Computer Modeling and Simulation, IEEE, (2009), 355–360. https://doi.org/10.1109/EMS.2009.86 |
| [21] |
V. Feliu, K. S. Rattan, H. B. Brown, Adaptive control of a single-link flexible manipulator, IEEE Control Syst. Mag., 10 (1990), 29–33. https://doi.org/10.1109/37.45791 doi: 10.1109/37.45791
|
| [22] |
S. K. Pradhan, B, Subudhi, Real-time adaptive control of a flexible manipulator using reinforcement learning, IEEE Trans. Autom. Sci. Eng., 9 (2012), 237–249. https://doi.org/10.1109/TASE.2012.2189004 doi: 10.1109/TASE.2012.2189004
|
| [23] | F. Ripamonti, L. Orsini, F. Resta, A nonlinear sliding surface in sliding mode control to reduce vibrations of a three-link flexible manipulator, J. Vib. Acoust., 139, (2017), 051005. https://doi.org/10.1115/1.4036502 |
| [24] |
L. Xu, X. Qian, R. Hu, Y. Zhang, H. Deng, Low-dimensional-approximate model based improved fuzzy non-singular terminal sliding mode control for rigid-flexible manipulators, Electronics, 11 (2022), 1263. https://doi.org/10.3390/electronics11081263 doi: 10.3390/electronics11081263
|
| [25] |
Y. Liu, D. Jiang, J. Yun, Y. Sun, C. Li, G. Jiang, et al., Self-tuning control of manipulator positioning based on fuzzy pid and pso algorithm, Front. Bioeng. Biotechnol., 9 (2022), 1443. https://doi.org/10.3389/fbioe.2021.817723 doi: 10.3389/fbioe.2021.817723
|
| [26] | X. Wu, D. Jiang, J. Yun, X. Liu, Y. Sun, B. Tao, et al., Attitude stabilization control of autonomous underwater vehicle based on decoupling algorithm and pso-adrc, Front. Bioeng. Biotechnol., 10 (2022). https://doi.org/10.3389/fbioe.2022.843020 |
| [27] |
H. Li, C, Qi, Modeling of distributed parameter systems for applications—a synthesized review from time-space separation, J. Process Control, 20 (2010), 891–901. https://doi.org/10.1016/j.jprocont.2010.06.016 doi: 10.1016/j.jprocont.2010.06.016
|
| [28] |
P. K. C. Wang, Control of distributed parameter systems, Adv. Control Syst., 1 (1964), 75–172. https://doi.org/10.1016/B978-1-4831-6717-6.50008-5 doi: 10.1016/B978-1-4831-6717-6.50008-5
|
| [29] |
D. Shang, X. Li, M. Yin, F. Li, Dynamic modeling and fuzzy compensation sliding mode control for flexible manipulator servo system, Appl. Math. Model., 107 (2022), 530–556. https://doi.org/10.1016/j.apm.2022.02.035 doi: 10.1016/j.apm.2022.02.035
|
| [30] |
Y. Ren, Z. Zhao, C. Zhang, Q. Yang, K. S. Hong, Adaptive neural-network boundary control for a flexible manipulator with input constraints and model uncertainties, IEEE Trans. Cybern., 51 (2020), 4796–4807. https://doi.org/10.1109/TCYB.2020.3021069 doi: 10.1109/TCYB.2020.3021069
|
| [31] |
K. S. Hong, Asymptotic behavior analysis of a coupled time-varying system: application to adaptive systems, IEEE Trans. Autom. Control, 42 (1997), 1693–1697. https://doi.org/10.1109/9.650018 doi: 10.1109/9.650018
|
| [32] |
T. Wang, Y, Chen, Event-triggered control of flexible manipulator constraint system modeled by pde, Math. Biosci. Eng., 20 (2023), 10043–10062. https://doi.org/10.3934/mbe.2023441 doi: 10.3934/mbe.2023441
|
| [33] |
S. Cao, B, Hang, Adaptive fault tolerant attitude control of flexible satellites based on takagi-sugeno fuzzy disturbance modeling, Trans. Inst. Meas. Control, 42 (2020), 1712–1723. https://doi.org/10.1177/0142331219895108 doi: 10.1177/0142331219895108
|
| [34] |
F. Jin, B. Guo, Lyapunov approach to output feedback stabilization for the Euler-Bernoulli beam equation with boundary input disturbance, Automatica, 52 (2015), 95–102. https://doi.org/10.1016/j.automatica.2014.10.123 doi: 10.1016/j.automatica.2014.10.123
|
| [35] |
Z. Liu, J. Liu, W. He, Modeling and vibration control of a flexible aerial refueling hose with variable lengths and input constraint, Automatica, 77 (2017), 302–310. https://doi.org/10.1007/978-981-15-2596-4 doi: 10.1007/978-981-15-2596-4
|
| [36] |
H. Yang, J. Liu, X. Lan, Observer design for a flexible-link manipulator with pde model, J. Sound Vib., 341 (2015), 237–245. https://doi.org/10.1016/j.jsv.2014.12.033 doi: 10.1016/j.jsv.2014.12.033
|
| [37] |
W. He, X. He, M. Zou, H. Li, Pde model-based boundary control design for a flexible robotic manipulator with input backlash, IEEE Trans. Control Syst. Technol., 27 (2018), 790–797. https://doi.org/10.1109/TCST.2017.2780055 doi: 10.1109/TCST.2017.2780055
|
| [38] |
F. Cao, J, Liu, An adaptive iterative learning algorithm for boundary control of a coupled ODE–PDE two-link rigid-flexible manipulator, J. Franklin Inst., 354 (2017), 277–297. https://doi.org/10.1016/j.jfranklin.2016.10.013 doi: 10.1016/j.jfranklin.2016.10.013
|
| [39] |
Z. Ma, P, Huang, Adaptive neural-network controller for an uncertain rigid manipulator with input saturation and full-order state constraint, IEEE Trans. Cybern., 52 (2020), 2907–2915. https://doi.org/10.1109/TCYB.2020.3022084 doi: 10.1109/TCYB.2020.3022084
|
| [40] |
E. A. Alandoli, T. S. Lee, A critical review of control techniques for flexible and rigid link manipulators, Robotica, 38 (2020), 2239–2265. https://doi.org/10.1017/S0263574720000223 doi: 10.1017/S0263574720000223
|
| [41] |
C. C. Beltran-Hernandez, D. Petit, I. G. Ramirez-Alpizar, T. Nishi, S. Kikuchi, T. Matsubara, et al., Learning force control for contact-rich manipulation tasks with rigid position-controlled robots, IEEE Rob. Autom. Lett., 5 (2020), 5709–5716. https://doi.org/10.1109/LRA.2020.3010739 doi: 10.1109/LRA.2020.3010739
|
| [42] |
M. Shi, B. Rong, J. Liang, W. Zhao, H. Pan, Dynamics analysis and vibration suppression of a spatial rigid-flexible link manipulator based on transfer matrix method of multibody system, Nonlinear Dyn., 111 (2023), 1139–1159. https://doi.org/10.1007/s11071-022-07921-6 doi: 10.1007/s11071-022-07921-6
|
| [43] |
J. Zhu, D. Navarro-Alarcon, R. Passama, A. Cherubini, Vision-based manipulation of deformable and rigid objects using subspace projections of 2d contours, Rob. Auton. Syst., 142 (2021), 103798. https://doi.org/10.1016/j.robot.2021.103798 doi: 10.1016/j.robot.2021.103798
|
| [44] |
W. He, S. Ge, B. V. E. How, Y. S. Choo, K. S. Hong, Robust adaptive boundary control of a flexible marine riser with vessel dynamics, Automatica, 47 (2011), 722–732. https://doi.org/10.1016/j.automatica.2011.01.064 doi: 10.1016/j.automatica.2011.01.064
|
| [45] |
A. Baccoli, A. Pisano, Y. Orlov, Boundary control of coupled reaction–diffusion processes with constant parameters, Automatica, 54 (2015), 80–90. https://doi.org/10.1016/j.automatica.2015.01.032 doi: 10.1016/j.automatica.2015.01.032
|
| [46] |
V. Dos Santos, C. Prieur, Boundary control of open channels with numerical and experimental validations, IEEE Trans. Control Syst. Technol., 16 (2008), 1252–1264. https://doi.org/10.1109/TCST.2008.919418 doi: 10.1109/TCST.2008.919418
|
| [47] |
S. Tang, C, Xie, State and output feedback boundary control for a coupled PDE–ODE system, Syst. Control Lett., 60 (2011), 540–545. https://doi.org/10.1016/j.sysconle.2011.04.011 doi: 10.1016/j.sysconle.2011.04.011
|
| [48] | C. D. Rahn, Mechatronic Control of Distributed Noise and Vibration, Springer, 2001. https://doi.org/10.1007/978-3-662-04641-8 |








Figures(9)

Yunxia Wei, Yuanfei Zhang, Bin Hang. Construction and management of smart campus: Anti-disturbance control of flexible manipulator based on PDE modeling[J]. Mathematical Biosciences and Engineering, 2023, 20(8): 14327-14352. doi: 10.3934/mbe.2023641







 DownLoad:
DownLoad: