In order to examine the potential and synergetic aspects of intelligent reflecting surface (IRS) techniques for Internet-of-Things (IoT), we study an IRS-aided Long Range (LoRa) system in this paper. Specifically, to facilitate the acquisition of accurate channel state information (CSI) for effective reflection of LoRa signals, we first propose an optimal training design for the least squares channel estimation with LoRa modulation, and then, by utilizing the acquired CSI, we develop a high-performing passive beamforming scheme based on a signal-to-ratio (SNR) criterion. Numerical results show that the proposed training design considerably outperforms the baseline schemes, and the proposed passive beamforming design results in a significant improvement in performance over that of the conventional LoRa system, thereby demonstrating the feasibility of extending coverage areas of LoRa systems with the aid of IRS.
Citation: Jae-Mo Kang, Dong-Woo Lim. Joint channel training and passive beamforming design for intelligent reflecting surface-aided LoRa systems[J]. AIMS Mathematics, 2024, 9(5): 11423-11431. doi: 10.3934/math.2024560
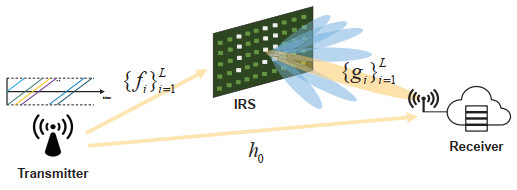
In order to examine the potential and synergetic aspects of intelligent reflecting surface (IRS) techniques for Internet-of-Things (IoT), we study an IRS-aided Long Range (LoRa) system in this paper. Specifically, to facilitate the acquisition of accurate channel state information (CSI) for effective reflection of LoRa signals, we first propose an optimal training design for the least squares channel estimation with LoRa modulation, and then, by utilizing the acquired CSI, we develop a high-performing passive beamforming scheme based on a signal-to-ratio (SNR) criterion. Numerical results show that the proposed training design considerably outperforms the baseline schemes, and the proposed passive beamforming design results in a significant improvement in performance over that of the conventional LoRa system, thereby demonstrating the feasibility of extending coverage areas of LoRa systems with the aid of IRS.

| [1] |
T. K. Nguyen, H. H. Nguyen, E. Bedeer, Performance improvement of LoRa modulation with signal combining and semi-coherent detection, IEEE Commun. Lett., 25 (2021), 2889–2893. https://doi.org/10.1109/LCOMM.2021.3091997 doi: 10.1109/LCOMM.2021.3091997

|
| [2] |
J. M. Kang, MIMO-LoRa for high-data-rate IoT: Concept and precoding design, IEEE Internet Things J., 9 (2022), 10368–10369. https://doi.org/10.1109/JIOT.2022.3143516 doi: 10.1109/JIOT.2022.3143516
|
| [3] |
L. Vangelista, Frequency shift chirp modulation: The LoRa modulation, IEEE Signal Proc. Lett., 24 (2017), 1818–1821. https://doi.org/10.1109/LSP.2017.2762960 doi: 10.1109/LSP.2017.2762960
|
| [4] |
M. Chiani, A. Elzanaty, On the LoRa modulation for IoT: Waveform properties and spectral analysis, IEEE Internet Things J., 6 (2019), 8463–8470. https://doi.org/10.1109/JIOT.2019.2919151 doi: 10.1109/JIOT.2019.2919151
|
| [5] |
C. Bernier, F. Dehmas, N. Deparis, Low complexity LoRa frame synchronization for ultra-low power software-defined radios, IEEE T. Commun., 68 (2020), 3140–3152. https://doi.org/10.1109/TCOMM.2020.2974464 doi: 10.1109/TCOMM.2020.2974464
|
| [6] | R. Ghanaatian, O. Afisiadis, M. Cotting, A. Burg, LoRa digital receiver analysis and implementation, In: ICASSP 2019-2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2019. https://doi.org/10.1109/ICASSP.2019.8683504 |
| [7] |
M. Xhonneux, O. Afisiadis, D. Bol, J. Louveaux, A low-complexity LoRa synchronization algorithm robust to sampling time offsets, IEEE Internet Things J., 9 (2022), 3756–3769. https://doi.org/10.1109/JIOT.2021.3101002 doi: 10.1109/JIOT.2021.3101002
|
| [8] | O. Georgiou, U. Raza, Low power wide area network analysis: Can LoRa scale? IEEE Wirel. Commun. Lett., 6 (2017), 162–165. https://doi.org/10.1109/LWC.2016.2647247 |
| [9] |
O. Afisiadis, S. Li, J. Tapparel, A. Burg, A. Balatsoukas-Stimming, On the advantage of coherent LoRa detection in the presence of interference, IEEE Internet Things J., 8 (2021), 11581–11593. https://doi.org/10.1109/JIOT.2021.3058792 doi: 10.1109/JIOT.2021.3058792
|
| [10] |
T. Elshabrawy, J. Robert, Closed-form approximation of LoRa modulation BER performance, IEEE Commun. Lett., 22 (2018), 1778–1781. https://doi.org/10.1109/LCOMM.2018.2849718 doi: 10.1109/LCOMM.2018.2849718
|
| [11] |
O. Afisiadis, M. Cotting, A. Burg, A. Balatsoukas-Stimming, On the error rate of the LoRa modulation with Interference, IEEE T. Wirel. Commun., 19 (2020), 1292–1304. https://doi.org/10.1109/TWC.2019.2952584 doi: 10.1109/TWC.2019.2952584
|
| [12] | O. Afisiadis, S. Li, J. Tapparel, A. Burg, A. Balatsoukas-Stimming, On the advantage of coherent LoRa detection in the presence of interference, 2020. arXiv: 2010.00507. |
| [13] |
D. Croce, M. Gucciardo, S. Mangione, G. Santaromita, I. Tinnirello, Impact of LoRa imperfect orthogonality: Analysis of link-level performance, IEEE Commun. Lett., 22 (2018), 796–799. https://doi.org/10.1109/LCOMM.2018.2797057 doi: 10.1109/LCOMM.2018.2797057
|
| [14] |
X. Zhang, W. Xu, G. Cai, Y. Song, G. Chen, A new reconfigurable intelligent-surface-assisted LoRa system, IEEE T. Veh. Technol., 71 (2022), 9055–9060. https://doi.org/10.1109/TVT.2022.3173675 doi: 10.1109/TVT.2022.3173675
|
| [15] |
Q. Wu, R. Zhang, Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network, IEEE Commun. Mag., 58 (2020), 106–112. https://doi.org/10.1109/MCOM.001.1900107 doi: 10.1109/MCOM.001.1900107
|
| [16] |
S. Gong, X. Lu, D. T. Hoang, D. Niyato, L. Shu, D. I. Kim, et al., Towards smart wireless communications via intelligent reflecting surfaces: A contemporary survey, IEEE Commun. Surv. Tut., 22 (2020), 2283–2314. https://doi.org/10.1109/COMST.2020.3004197 doi: 10.1109/COMST.2020.3004197
|
| [17] |
J. M. Kang, Intelligent reflecting surface: Joint optimal training sequence and refection pattern, IEEE Commun. Lett., 24 (2020), 1784–1788. https://doi.org/10.1109/LCOMM.2020.2991178 doi: 10.1109/LCOMM.2020.2991178
|
| [18] |
B. Zheng, R. Zhang, Intelligent reflecting surface-enhanced OFDM: Channel estimation and reflection optimization, IEEE Wirel. Commun. Lett., 9 (2020), 518–522. https://doi.org/10.1109/LWC.2019.2961357 doi: 10.1109/LWC.2019.2961357
|
| [19] |
Y. C. Liang, R. Long, Q. Zhang, J. Chen, H. V. Cheng, H. Guo, Large intelligent surface/antennas (LISA): Making reflective radios smart, J. Commun. Inform. Netw., 4 (2019), 40–50. https://doi.org/10.23919/JCIN.2019.8917871 doi: 10.23919/JCIN.2019.8917871
|
| [20] | Q. Wu, R. Zhang, Intelligent reflecting surface enhanced wireless network: Joint active and passive beamforming design, In: 2018 IEEE Global Communications Conference (GLOBECOM), 2018. https://doi.org/10.1109/GLOCOM.2018.8647620 |
| [21] |
Q. Wu, R. Zhang, Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming, IEEE T. Wirel. Commun., 18 (2019), 5394–5409. https://doi.org/10.1109/TWC.2019.2936025 doi: 10.1109/TWC.2019.2936025
|
| [22] | X. Yu, D. Xu, R. Schober, MISO wireless communication systems via intelligent reflecting surfaces, In: 2019 IEEE/CIC International Conference on Communications in China (ICCC), 2019. https://doi.org/10.1109/ICCChina.2019.8855810 |
| [23] |
H. Guo, Y. C. Liang, J. Chen, E. G. Larsson, Weighted sum-rate maximization for reconfigurable intelligent surface aided wireless networks, IEEE T. Wirel. Commun., 19 (2020), 3064–3076. https://doi.org/10.1109/TWC.2020.2970061 doi: 10.1109/TWC.2020.2970061
|
| [24] |
M. Zhu, K. Guo, Y. Ye, L. Yang, T. A. Tsiftsis, H. Liu, Active RIS-aided covert communications for MISO-NOMA systems, IEEE Wirel. Commun. Lett., 12 (2023), 2203–2207. https://doi.org/10.1109/LWC.2023.3314625 doi: 10.1109/LWC.2023.3314625
|
| [25] |
Z. Lu, Y. Zhao, X. Li, C. Z. Xu, Randomized passive energy beamforming for cooperative localization in reconfigurable intelligent surface assisted wireless backscattered sensor network, IEEE Internet Things J., 11 (2023), 9693–9707. https://doi.org/10.1109/JIOT.2023.3323426 doi: 10.1109/JIOT.2023.3323426
|
| [26] |
S. Zhang, R. Zhang, Capacity characterization for intelligent reflecting surface aided MIMO communication, IEEE J. Sel. Area. Commun., 38 (2020), 1823–1838. https://doi.org/10.1109/JSAC.2020.3000814 doi: 10.1109/JSAC.2020.3000814
|
| [27] |
M. Hanif, H. H. Nguyen, Slope-shift keying LoRa-based modulation, IEEE Internet Things J., 8 (2021), 211–221. https://doi.org/10.1109/JIOT.2020.3004318 doi: 10.1109/JIOT.2020.3004318
|
| [28] | J. Tapparel, Complete reverse engineering of LoRa PHY, Available from: https://www.epfl.ch/labs/tcl/wp-content/uploads/2020/02/Reverse_Eng_Report.pdf |
| [29] |
M. Biguesh, A. B. Gershman, Training-based MIMO channel estimation: A study of estimator tradeoffs and optimal training signals, IEEE T. Signal Proces., 54 (2006), 884–893. https://doi.org/10.1109/TSP.2005.863008 doi: 10.1109/TSP.2005.863008
|
| [30] | S. Y. Wang, Y. R. Chen, T. Y. Chen, C. H. Chang, Y. H. Cheng, C. C. Hsu, Performance of LoRa-based IoT applications on campus, In: 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), 2017. https://doi.org/10.1109/VTCFall.2017.8288154 |
| [31] | K. E. Nolan, W. Guibene, M. Y. Kelly, An evaluation of low power wide area network technologies for the internet of things, In: 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), 2016. https://doi.org/10.1109/IWCMC.2016.7577098 |
| [32] | J. Petajajarvi, K. Mikhaylov, A. Roivainen, T. Hanninen, M. Pettissalo, On the coverage of LPWANs: Range evaluation and channel attenuation model for LoRa technology, In: 2015 14th International Conference on ITS Telecommunications (ITST), 2015. https://doi.org/10.1109/ITST.2015.7377400 |
| [33] | J. Tapparel, O. Afisiadis, P. Mayoraz, A. Balatsoukas-Stimming, A. Burg, An open-source LoRa physical layer prototype on GNU radio, In: 2020 IEEE 21st International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), 2020. https://doi.org/10.1109/SPAWC48557.2020.9154273 |
| [34] | IEEE 802.20 WG, IEEE 802.20 channel models document, IEEE 802.20 PD-08r1, 2007. |


Figures(3)

Jae-Mo Kang, Dong-Woo Lim. Joint channel training and passive beamforming design for intelligent reflecting surface-aided LoRa systems[J]. AIMS Mathematics, 2024, 9(5): 11423-11431. doi: 10.3934/math.2024560







 DownLoad:
DownLoad: